





前 NASA 工程师发明「水下变形金刚」:海底搜救,再也不求人!
本文来自公众号硅星人(ID:guixingren123),作者光谱、杜晨,爱范儿经授权发布。
兼具水下超远航行和复杂作业的能力,这台「水下变形金刚」展现了机器人技术的巅峰。
一艘黄色的水下小艇,在你的面前敏捷地滑过:

来到一处设施面前,小艇停了下来。它的身体开始展开,两只手臂缓慢伸出:

大约三十秒后,手臂展开完成!刚才的潜水艇,已然变成了一架水底机器人。

▲ 动图经过去帧压缩,显示效果为6x速度
你所看到的这些,并非烂尾科幻大片《变形金刚》的续貂之作。
这里,正是美国宇航局 NASA 位于得州休斯顿的约翰逊太空中心。而这台无人机,是当地一家创业公司刚刚发明出来的,真实存在的「水下变形金刚」: Aquanaut.
据休斯顿机甲公司 (Houston Mechatronics Inc. 简称 HMI) 介绍,他们开发的这台机器人,是目前世界上第一台能够在工作环境下完成变形的水下双姿态无人机器人。
何谓「双姿态」?这还要从水下无人机的类型,「展开」来讲。
在过去,水下无人机通常有两种形态。
第一种是鱼雷型。流线型的艇身是对水下动物的仿生,使得无人机可以在水中快速前进、完成几十甚至上百海里的长距离移动。这类无人机已经存在多年,安装相机、传感器和采样装置,可以用于科考任务。但是这一型的无人机的问题,在于它们无法和水下世界主动发生交互:

另一种,则是一点都不酷,方方正正,看起来十分臃肿的水下操纵型机器人。因为面向一些更复杂的操控作业,这类机器人采用了另一种仿生路线,用机械臂完成工作。但是它的抗极端环境(比如洋流)能力很差,部署要求很高:

而 HMI 公司所开发的 Aquanaut 机器人,采用了一个更加大胆的思路:对于鱼雷型和操纵型这两种有着巨大差异的设计理念,它成为了两者首次「合体」的产物。
▲ 来源:YouTube
Aquanaut 的首席工程师 Sandeep Yayathi 在接受 IEEE Spectrum 采访时表示,当他们决定开发水下机器人时,从一开始就想要采用视频中这种「变形金刚」式的风格。
「我小时候是个变形金刚迷,设计职业道路时,我就想这辈子一定要亲手造出一台变形金刚来,」Yayathi 说。
但是大部分人都清楚,面向一个特定的用途专门开发的技术,往往比一个「四不像」更好用。因此,尽管在科幻电影中看起来很酷,变形机器人很长时间以来都不被专业人士看好。

但是到了水下,一切就不一样了。
正如前述,在过去水下机器人只有两种可选:选择流体动力、长距旅行,意味着无人机没有交互能力;选择操纵型,意味着必须要到地才能部署,在极端环境下的抗干扰能力差。
比如海上钻井平台和海底光缆公司,对于水下检查、维修的有着持续需求,也在使用机器人技术。但事实上,它们所依赖的机器人,已经很久没有发生过迁越式的创新了。
如果能有一台平时能在钻井平台之间,或沿着海底光缆快速移动,到了位置立刻变身维修工的机器人,既能节省人工、减少伤亡风险,也降低了机器人使用和维护的成本,对于这些公司将会带来极大的便利。
而这台「水下变形金刚」,就是为了改变这一切而诞生的。

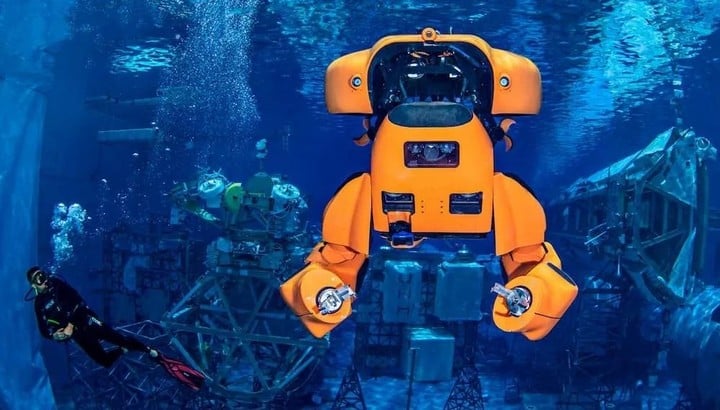
上图中,在小艇状态下,Aquanaut 有着优异的流体动力学(1);到了位置,机盖升起,露出机械臂(2);随着机械臂的展开,小艇的头部也慢慢升起进入工作位置,露出摄像头、声纳、3D传感器等,机舱内也有额外的水下推进装置,用于调整姿态(3);手臂上标配钳爪,也可以替换其他设备,(4)。
变形之后,它的机械臂可以完成许多不同的操纵作业,比如抓取、使用工具等等。机械臂的灵活度很高,因为每一节都有独立的电机控制。
不仅如此,Aquanaut 还有很大程度上的自主作业能力,用户可以发出「顺时针旋转阀门90度」的命令,无人机可以自己根据现场情况,调整姿态、握住阀门、完成作业。
和过去的操纵型水下机器人相比,Aquanaut 还有一个优势,就是不再需要线缆的保护。目前,它采用锂电池驱动,最远单程可以达到200公里,约合108海里。
拿海底光缆公司举例,当发生故障时,它们首先需要检查故障位置,然后维修人员驾船到达地点,把一个冰箱一样的操纵机器人放下去,完成维修。过程中可能需要真人,还可能需要运用多种不同的机器人。
而现在,只需要一台无人机,就可以完成检查、维修的工作,在上百海里外远程部署也没有问题。

HMI 的很多员工都曾在 NASA 工作。尽管 NASA 是一个太空探索的科学机构,有趣的是,它的很多工作都是在水下完成的。它不但有水下研究部门,因为派宇航员上天之前需要大量训练,这些工作中很多也是在水下完成的。
通常人们都会认为,上天比下海更难,但在 HMI 首席技术官 Nic Radford 看来,让机器人在水下正常工作,反而比在太空中需要更强大的技术。
「太空是一个近乎完美的环境,而水下更加复杂,动态程度极高,」他给了一个简单的估算:让机器人在水下工作,比在太空中可能难至少50倍。
创办 HMI 之前,Radford 在 NASA 参与 Robonaut 机器人计划,其研制的机器人已经进入了国际空间站。Yayathi 则是 NASA 月球车计划的主要工程师之一。
HMI 创办于2014年,目前已经获得了2,300万美元的风投资金。虽然目前还没有真的「下海」,Aquanaut 也已经在 NASA 约翰逊航天中心的巨型「游泳池」里进行了大量测试。
该公司计划继续对 Aquanaut 进行优化,使得它可以自动前往维修地点、返回,只在作业期间需要人的控制、监督。
不仅如此,他们还有想法,在全球多地的海上部署无人船,作为 Aquanaut 的中继站,进而形成一个全球运作的网络。这样,用户可以坐在伦敦的办公室里,遥控位于印度洋的水下无人机。
如果钻井平台和海底光缆公司采用了这项技术,意味着维修工作将不再需要大批人马乘着船,每天奔波在大海上。尽管这些利润导向的公司对于技术换代很谨慎,他们应该会欢迎任何能够降低风险和成本的「黑科技」,包括这台「水下变形金刚」。
「用无人机完成水下工作,会有更好、更具成本效益的方式。我们的任务就是证明这一点,」Radford 表示。






