还是结构光,苹果新机为何继续选择这项 FaceID 技术?
9 月 11 日,一年一度的苹果秋季发布会如期举行。这一次,苹果以「致创新」为主题,会上发布新款手机 iPhone 11、iPhone 11 Pro,值得关注的是,其前置人脸解锁支付仍然采用了结构光方案。
自 2017 年 9 月,iPhone X 人脸解锁支付全球首发,至今已有三个年头,期间经历的机型包括 iPhone X、iPhone XS、iPhone XS Max、iPhone XR、iPhone 11,iPhone 11 Pro,这些机型的人脸解锁支付无一例外全部采用了结构光方案。
这意味着采用结构光做解锁支付的量产机型出货量已经达到数亿级别。
天风国际知名分析师郭明錤预测,2020 年的 iPhone 仍然会采用结构光做 FaceID。究竟是什么原因让结构光成为苹果 FaceID 的唯一技术方案?
FaceID,也就是人们常说的刷脸解锁支付,一方面因为涉及用户的隐私和钱财,对安全性要求非常高,另一方面因为使用频繁,对用户体验要求也特别高。而结构光技术恰恰从这两方面很好地满足了刷脸的需求,这也就不难理解为何苹果一直钟情于结构光方案了。
无可比拟的安全解锁
从安全性上来说,FaceID(人脸)的安全级别是 TouchID(指纹)的 20 倍,前者是百万分之一,后者是五万分之一。这种高安全性,一方面来源于人脸特征比指纹丰富,更不容易出现误识别;另一方面是通过 3D 信息的辅助,让人脸比对和活体检测都更可靠。
人脸特征比对要可靠,2D 图像分辨率是一个重要指标,目前业内一般要求 VGA 分辨率,也就是 30 万像素。对于 3D 图像而言,从深度分辨率和深度精度两方面都提出了要求。从深度分辨率方面,iPhone X 采用了分辨率为 100 万像素的图像传感器。深度精度方面,结构光可以在整个解锁支付所要求的距离范围内都做到 1 毫米以下的相对精度。精度高则意味着人脸轮廓更准确,更容易判别是否是用户本人在刷脸。
结构光还具备不同时间和不同方向的一致性。不同时间的一致性是说,第一帧图像跟后面的若干帧图像不会因为时间不同而产生较大的偏差。不同方向的一致性是指,不论是从正脸拍还是侧脸拍,还原出来的人脸轮廓都不会出现较大的偏差。
根据上面提及的深度分辨率、深度精度、不同时间的一致性和不同方向的一致性,我们对结构光和 ToF 这两种 3D 技术方案进行对比。

随时随地的无感体验
苹果在包含大面积光学指纹等新技术的众多选择中,仍然选择 FaceID。除安全性外,用户体验也是 FaceID 的明显优势。
相比 TouchID,FaceID 的优势在于能实现无感解锁支付。整个解锁支付过程不需要身体直接接触检测仪器。人脸识别属于非接触识别,隔空自动采集图像,便于实施。用户不需要有意识地去做「按指纹」的动作,只要用户确认,就可以自动完成。据统计,iPhone X 手机用户平均每天要解锁手机数百次,人脸识别解锁大大简化了解锁过程。
与此同时,FaceID 属于动态场景运用,指纹是静态生物特征,人脸检测往往处于动态的场景,更难以伪造,人撞脸的概率要比撞指纹的概率要小的多。
3D 人脸可以实现全场景的解锁支付体验,也就是在不同光照、不同背景、不同气候条件下能实现一致的解锁支付体验。无论是在全黑环境、户外强光、复杂背景光照或是寒冷冬天,FaceID 都能正常工作,而指纹在干冷、潮湿或者冬天需要带手套的环境下,都会遇到困难。相比较而言,2D 人脸也非常容易受到光照影响。
具有先天优势的刷脸解决方案
散斑结构光机理决定了结构光方案的先天优势,结构光的分辨率取决于图像感光器件(IR CMOS Sensor)的分辨率。以 iPhone X 为例,其激光投射的散斑点数可达三万点,但其接收散斑的 CMOS 分辨率达到了 100 万像素,所以,iPhone X 的最大深度分辨率是 100 万像素。
可能有人会问,为什么发射出去的斑只有 3 万点却能得到 100 万像素的分辨率呢?这正是结构光的优势所在。
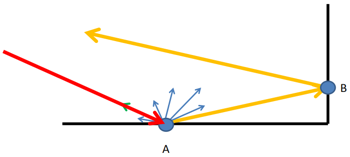
结构光的核心器件包括散斑发射器和图像传感器,散斑发射器将特殊编码后的散斑图案投射到物体表面上,这些图案经物体表面反射回来时,随着物体距离的不同会发生不同的形变,图像传感器可以将形变后的图案拍下来。结构光算法正是通过计算拍下来的图案里的每个像素的变形量,来得到对应的视差,从而进一步得到深度值的。
1. 到底是如何计算的呢?
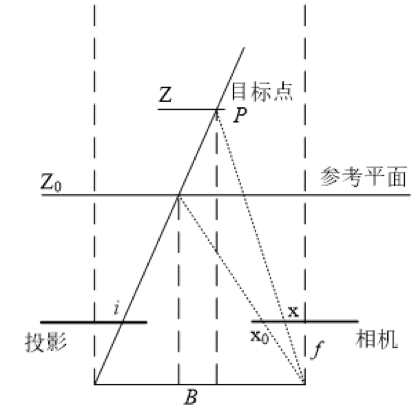
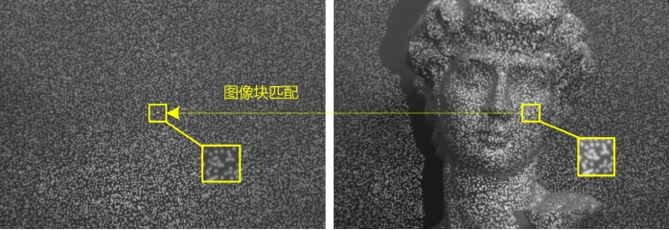
我们以块匹配的算法为例。首先,我们需要选择一幅平面散斑图作为参考图,实际上在出厂前就在特定距离拍好这样的参考图并且存起来了。假如我们想知道实际拍到的散斑图像正中心像素变形了多少,我们会以这个像素为中心选择一个图像块,比如 25×25 个像素的图像块,然后我们在参考图上搜索到与其相匹配的图像块,通过计算两个图像块的偏移,就可以得到该点的视差,从而可以根据三角测量原理算出深度值。
2.100 万像素不是极限
同样是 3 万点的散斑,如果我们采用更大分辨率的图像传感器,还可以得到更高分辨率的深度图。而结构光所需的图像传感器就是常规的 IR CMOS,并不需要特别定制,相对成本较低,也容易迭代升级。
3. 较小功耗测量场景深度
采用稀疏散斑就可以恢复出场景深度,意味着能耗比更高。散斑发射器只需要照亮物体表面不到一半的区域,没有散斑点的地方都没有消耗能量,从而可以用较小的功耗代价测量出场景的深度。为了继续降低功耗,3 万点也不是下限,实际上 iPhone X 就提供了通过约 1 万 5 千点的散斑得到深度图的模式。
总的来说,无论是从技术安全还是产品体验的角度考虑,结构光仍然是手机前置摄像头的首选,再加上其丰富的应用经验和稳定的「无感」表现,结构光无疑将长踞高低中各种档位手机的「C 位」。传感行业全球领军企业奥比中光认为,回应手机前置摄像头的真实需求,结构光已经足够成熟,相较之下,ToF 方案还有不少难题需要解决。
本文为投稿。爱范儿聚焦科技及互联网领域,更关注科技和互联网之于个体的影响,如果你的文章方向为消费电子产品(手机等硬件)及其产业、科技及互联网公司、商业事件、互联网文化现象等,欢迎来稿。投稿邮箱:[email protected]












