






狂潮与暗战,兵临城下的自动驾驶时代
本文共 6913 字,阅读大致需要 15 分钟。
4 天前,在 LVCC(拉斯维加斯会展中心)旁一块用围栏的空地上,一辆黑绿色旧款林肯 MKZ(实际代号“BB8”)和一辆黑红相间的奥迪 Q7 静静地停着。其貌不扬的他们实际上都是自动驾驶汽车,而我即将搭乘其中一辆。

两台自动驾驶汽车:林肯 MKZ 和奥迪 Q7(图片来自 Arstechnica)

柏油路面的空地被画出了一条路,一部分用标志线,一部分则是事先铺上了绿色“假草”地毯,然后覆盖上了小石子,又或者只是用断断续续的大石块来标示道路边缘。中部还有着一条用两排“交通锥”引出的小捷径,旁边放着一个拖拽式、大尺寸方向指示牌,能够显示转向提示。

林肯 MKZ 自动驾驶车中控台(图片来自 Arstechnica)
一番折腾,我们最终坐进了 BB8 车内,好奇的我们自然马上开始打量车内细节。
中控台下方多了一个用来控制自动驾驶功能的平板,在手枕前方还有一个红色紧急停止按钮,除此之外就只有一个架设在驾驶员位置底部的机械装置,主要用于控制油门和离合。除此之外跟一般轿车并无二样。

配备了自动驾驶技术的奥迪 Q7
在低头简单核对了下自动驾驶系统工作状态之后,工作人员回过头来简单问了句:“Are you Ready?”看到心跳开始加速的我们竖出了大拇指,工作人员下达了开始自动驾驶的命令,车辆开始缓缓启动。
BB8 没有像我们一般驾驶考试中那样挂着 1 档放开手刹慢慢“蹭”着前进,很快将速度提到了 25-30 公里每小时。在进入弯道的时候,我能明显感觉到离心力,但整个过程中 BB8 没有一丝犹豫,干净利落。
就在 BB8 已经环绕了两圈之后,工作人员趁着间隙直接将大方向指示牌拉了出来,并且打出左转指示灯。当 BB8 再次来到这个岔路口时,没有丝毫迟疑的,它就按照指示牌所标示向左转,并且开始以“o”字形路线行进。
又是两圈,工作人员又将方向指示牌拉开了,并且给出了右转的信号。林肯 MKZ 没有任何迟疑地又开始围着椭圆形外圈开始环绕,在走完最后半圈之后,工作人员关闭了自动驾驶功能,车辆缓缓停止,自动驾驶的第一次试驾体验也随之结束。
如果给我蒙着眼睛坐这辆 BB8,我或许会以为这是一个驾龄至少 5 年的老司机水平,而这仅仅是 BB8 在现场自我“学习”了 4 天的结果。
百花争鸣,自动驾驶技术狂潮

图片来自 Generationhighoutput
在 BB8 试驾场地的马路对面,就是 CES 2017 面积最大的场馆 LVCC,而 LVCC 核心区域 North Hall(北厅)和 Center Hall(中央厅)中,就是本次 CES 最热门的汽车领域:大众、本田、丰田、尼桑、福特、现代、宝马、克莱斯勒、林肯、三菱等传统车厂悉数出席。
作为去年全新趋势的延续,观众们的注意力并没有聚集在这些传统汽车业巨头身上,而更多是放在了 NVIDIA、法拉第未来(Faraday Future)、百度、高通、Velodyne 等新生力量之上。
一番盘点自然也无法避免,根据展位以及 CES 期间的动作,我们基本可以将他们分为 3 个梯队:
第一梯队:英伟达、现代、福特

英伟达 BB8 无人驾驶汽车
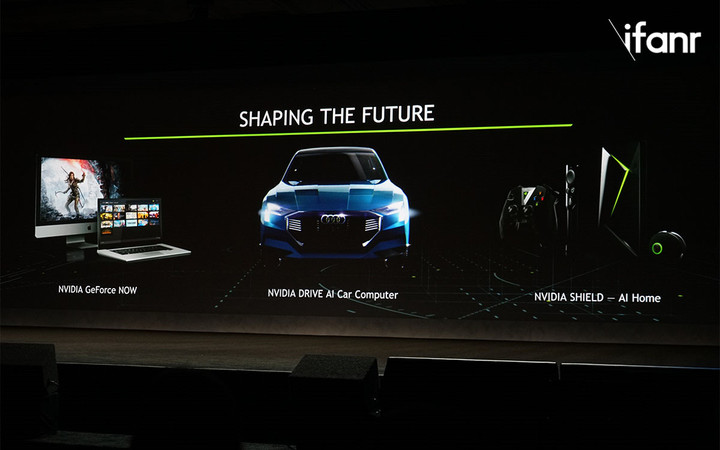
在 CES 开展前一天,英伟达 CEO 黄仁勋登上了 CES 主题演讲的舞台,而自动驾驶技术正是其演讲的一个重要部分,他还公布了一系列重磅信息:
- 上文中提到我们试乘的 BB8 自动驾驶汽车;
- 搭载全新 Tegra 处理器的 XAVIER 自动驾驶运算平台;
- 全新的驾驶者行车状态监测系统 Co-Pilot;
- 公布与奥迪、百度、ZF、BOSCH 等一系列公司的合作。
NVIDIA DRIVE PX 自动驾驶硬件平台
简单概括来说就是:硬件又强大了一截;除了道路他们也开始智能识别驾驶者;与汽车业界合作基本已经达成,为打造自动驾驶汽车扫清了基础障碍。而演讲中黄仁勋同样也公布了 NVIDIA 在自动驾驶终极计划:
2020 年,借助 NVIDIA 人工智能车载电脑驱动,最先进的无人驾驶汽车将上路。

现代 IONIQ
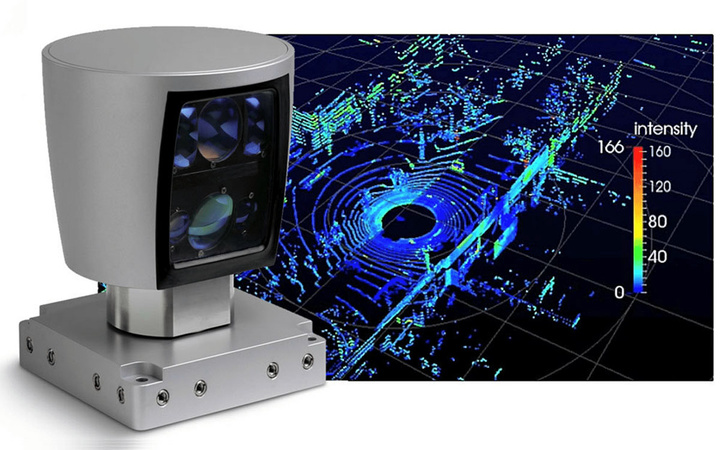
现代是另外一家在 CES 展会上带来全新无人驾驶实车的公司,新车名叫 IONIQ,计划分别发布混动、混动插电、全电动版本。在自动驾驶硬件方面它也非常特别,使用了一套“IBEO 激光雷达+前向多摄像头+长短探测距离雷达”解决方案。
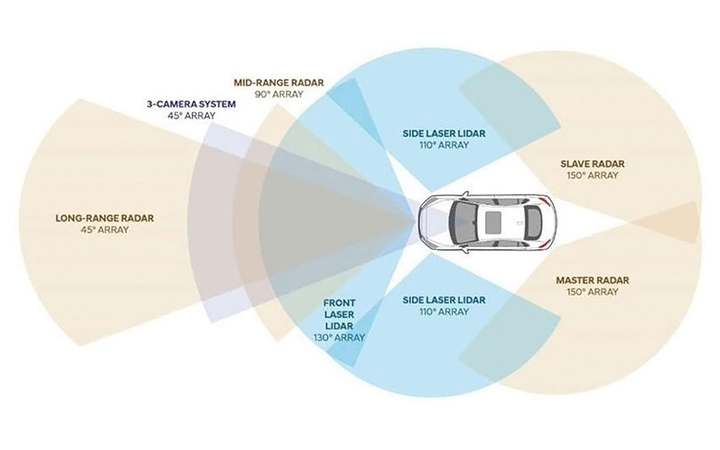
图片来自 SpringerProfessional
其中最值得一提的是 IBEO 激光雷达,与常见的 16、32 甚至 64 线 360 度旋转雷达不同,IBEO 只有 4 线,同时也不需要整个传感器在高速旋转下工作。(点击查看 4 线 LiDAR 与 64 线 LiDAR 实际效果对比,请自备梯子)
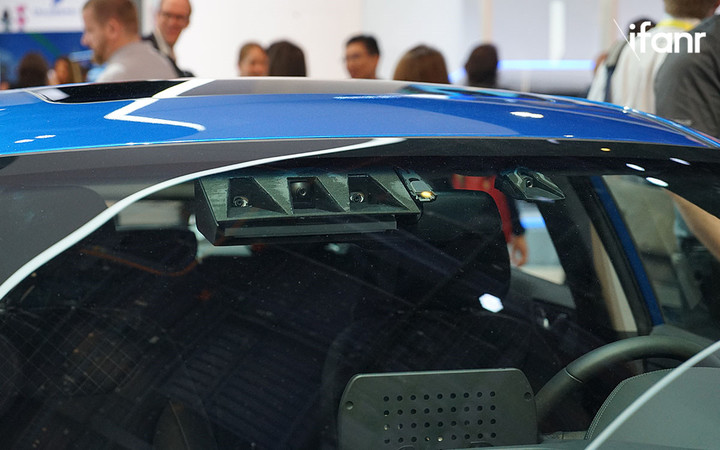
现代 IONIQ 后视镜位置有多个摄像头
就在去年 11 月,欧司朗公司实际上已经生产出了一种体积非常小,但能够稳定提供 4 条完全平行激光的激光器,欧司朗还表示他们希望大量生产之后,这一元件价格能够最终降到 40 欧元(43.5 美元)左右。与此同时,它却有着至少 200/70(车辆/行人)米探测距离。
根据目前进度,现代打算在 2020 或 2021 年将这辆自动驾驶汽车变为现实。

福特第二代蒙迪欧混合动力自动驾驶汽车
2013 年 12 月中旬,福特就已经和密歇根大学合作打造了第一代蒙迪欧自动驾驶原型车。第二代产品的不同不仅仅是载具换成了新款蒙迪欧那么简单。

Velodyne PUCK 16 线激光雷达
最关键的自动驾驶功能硬件迎来了大改变,车顶 4 个“小脑袋(Velodyne 32 线激光雷达)”消失了,换成了两个架设在倒后镜上方的 Velodyne PUCK 16 线激光雷达。
这样一来,激光雷达方面所需要付出的成本瞬间降低,同时因为激光雷达的高度有所降低,车身侧面的盲区也有所减小。

车顶行李架安装有摄像头
看似普通的车顶行李架实际上每边各装了 3 个摄像头,分别负责前后和侧面的视觉捕捉。不过要说最令人意外的,要数福特在展会中直接将这辆车的尾箱打开,也让我们第一次瞥见了它真实的“大脑”。

安置在尾箱中的自动驾驶驱动硬件
计算单元、网络设备、数据电缆、供电设备满满当当地塞满了一个尾箱。这估计是带有试验性质的装备,毕竟普通消费者肯定不愿意宝贵的车内空间被占据。当然未来福特肯定会采用 NVIDIA 之类的集成硬件方案。
第二梯队:法拉第未来、英特尔、高通、日产、宝马

法拉第未来 FF91
因为各种负面消息,法拉第未来在 CES 开始之间就吸引了不少目光,而他们最终在 CES 开展之前拿出来的 FF91 虽然无法细细审视,但从现场表现来看的确可圈可点。
除了是一辆各种数据都拿来对标 Tesla 的新电动汽车之外,FF91 上面同样搭载了自动驾驶功能:引擎盖上设置可伸缩激光雷达传感器,后视镜前方设置有两个摄像头,其他相对不容易发现的传感器更多。官方给出的数字是全车一共有 10 个 360 度摄像头、13 个毫米波雷达、12 个超声波感应器。
传感器数量已经完全超过了 Tesla AutoPilot 2.0 配置,但是现场无人驾驶环节实际展示相对比较简单:在模拟停车场中寻找空位,并且倒车入库。反倒是更为关键的道路自动驾驶功能,乐视从未提及。

打着高通骁龙 Logo 的玛莎拉蒂,非自动驾驶汽车
作为目前全球移动计算芯片的最主要供货商,高通自然也不会对自动驾驶袖手旁观,虽然自己还没有制造出自动驾驶实车,他们还是在本次 CES 带来了一大群开发者,以及他们针对不同应用场景给出的解决方案。
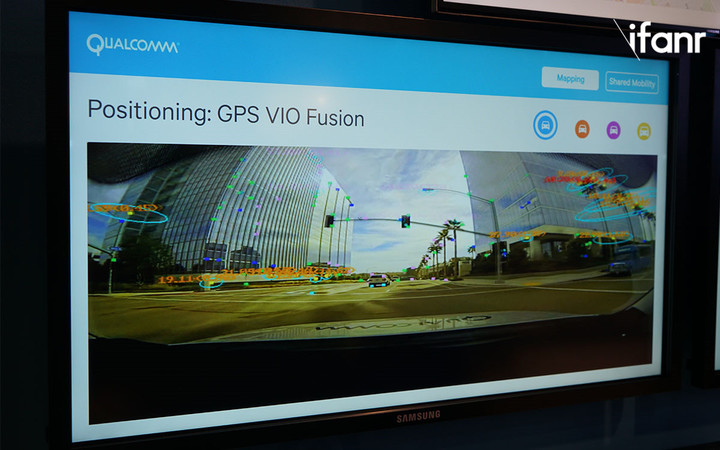
就比如上图中展示的,就是一种利用周围环境特征点,计算自身和对象物体移动速率的解决方案。并且据此与高清地图形成联动,提供一种有高清地图协助的全自动驾驶方案。
除了这个方案外,现场也有很多对道路、车辆、行人识别的方案。但值得特别留意的是,现场并没有给出一套一体化解决方案。
图片来自 Youtube
相比前面要么有实车、要么有技术展示的友商,英特尔今年并没有选择跟其他汽车企业一样在 North Hall 布展,但还是在 CES 期间公布了几则重磅消息。
首先是专为自动驾驶产品推出的“英特尔 GO”,其中包括硬件(英特尔旗下各种处理器、甚至是刚收购的 FPGA),一个完整开发平台、以及英特尔目前所拥有的 5G 技术。
紧接着,之前已经形成合作关系的“三巨头”,宝马集团、英特尔和 Mobileye 宣布大约 40 辆宝马无人驾驶汽车将于 2017 年下半年开始路测。最终目标是在 2021 年推出第一款全无人驾驶汽车 BMW iNEXT。

日产新一代聆风
日产 CEO 卡洛斯·戈恩今年也参加 CES 主题演讲,在演讲过程中他特别宣布:日产已经在研发新一代聆风。抛开其纯电动车性能和设计细节,它也将会成为日产下一辆引入自动驾驶技术的汽车。
并且聆风还搭载日产自主研发的 ProPilot 半自动驾驶系统,这个系统现在仅被安装在日本国内销售的 Serena。根据日产介绍,借助 Serena 前挡风玻璃上一个摄像头,ProPILOT 可以在高速公路行驶时,根据车主设置行驶速度实现以下的 L2 辅助驾驶:
- 自主跟车;
- 车道保持;
- 自动启停(判断依据为前车动态,且重新启动时需要车主轻踩油门发出指令);
- 识别前车变道动态,自动切换跟随对象。

宝马新 5 系
宝马展位位于展馆外,在特定区域内展示了一套全自动化停车解决方案,方案中还采用了 Segway Robotics 的 9 号机器人进行引导,而配备了 Personal Co-Pilot 功能的宝马新 5 系轿车可以自己倒车入库停在车位上。
第三梯队:黑莓、三菱、大众、本田、克莱斯勒、乐视、丰田

黑莓 QNX 改造的林肯新 MKZ
相比其他,黑莓利用林肯新 MKZ 打造的这辆自动驾驶汽车要“粗糙”不少,不仅探测器似乎只有车顶的两个激光雷达和两个定向雷达,同时传感器的安装走线都充满了“临时感”。

三菱欧蓝德自动驾驶车
三菱这辆欧蓝德相对来说更像是个“架子货”,因为车顶上方探测器结合体似乎并没有任何与车内连接的数据线,同时就连驾驶舱内摄像头都用了罗技的普通网络摄像头。
百度

展示方法略为诡异,直接从车内拉出电源接到一个独立的激光雷达上,车上似乎也没有安装其他自动驾驶所需的传感器。
另外一方面,百度智能汽车事业部(Baidu iV)也在这届 CES 上也公布了与北汽达成全面战略合作关系。据了解,北汽 L3 级自动驾驶车型有望在今年年底开始路测。
概念车党:

大众 I.D.概念车

本田 Neuv 概念车

克莱斯勒 Portal

乐视概念车 LeSEE PRO
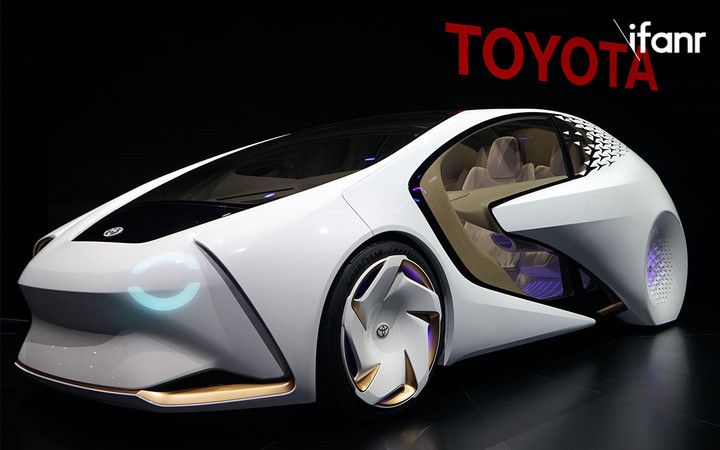
丰田“CONCEPT – 爱 i ”概念车
很明显,“有自动驾驶”几乎已经成为了本次 CES 所有新旧车企的硬性指标,无论是实车还是概念车,有几乎就是底线。
说到这就不能不提在这一届 CES 上自动驾驶元素稀缺的奔驰,但很快他们也意识到了问题所在,在 CES 倒数第二天拉来了 NVIDIA CEO 黄仁勋,与奔驰数字车辆与移动副总裁 Sajjad Khan 一起再次宣布了一个“雄心勃勃”的计划——在 12 个月内推出一款自动驾驶产品。
这种无奈也恰好指出了目前“自动驾驶技术”的发展态势——箭在弦上不得不发。一股自动驾驶的狂潮已经来临。
狂潮之下,技术暗战不断

图片来自 Awesomeocean
从特定角度来看,自动驾驶汽车就是一个“世界级风口”,而且参与者都含金量十足:传统汽车业巨头、世界半导体业巨头、各种拥有巨额资本的新玩家。
而他们共同奔向自动驾驶未来的过程中也称不上和平共处,即便是最纯粹的技术,也有这优劣之分。而也正是这些技术研究和推进者的不断努力,最终将把自动驾驶真正变为现实,以下是目前“斗争”最激烈的三个点:
1. 高规格激光雷达 VS 多头视觉捕捉

Uber 自动驾驶汽车 图片来自 NYTimes
首先需要明确的是,即便是像 Waymo、Uber 这样采用了高规格激光雷达的解决方案,依旧有利用到视觉捕捉技术,所以我们这里讨论的是自动驾驶技术对于环境感知、探测的部分。
作为本届 CES 上一个不起眼的现象——高规格激光雷达传感器已然消失不见,取而代之的基本上都是 4 线、16 线产品。自动驾驶先行者队伍中基本只剩下 Waymo 跟 Uber 仍在使用 64 线激光雷达。
Velodyne 64 线激光雷达 图片来源 UMN
大家从高规格激光雷达转向视觉捕捉技术的原因也很简单,前者实在太贵了。以激光雷达领头羊公司 Velodyne 的 64 线产品为例,单价高达 8 万美元。并且在实际使用中,车身附近依旧存在盲区,需要通过其他传感器(摄像头、雷达)来填补。
这也不是简单通过工业生产能够解决的问题,多线激光雷达本来就是一种非常精密的测量工具,不仅有着安装精度极高的激光模块,同时还需要保证整天仪器长时间高速旋转,从而获得 360 度的探测效果。

相比之下,视觉捕捉方案则“简单”很多:直接将捕捉到的视频和雷达探测到的距离信息输入 NVIDIA DRIVE PX 2 这样的中央处理平台即可。当然,怎么才能够通过成本低廉、同时只包含二维信息的视频数据生成立体 3D 空间就是另外一个问题了。
换个角度说,这就好比一场有着两个选手的短跑比赛。一边是技术和效果已经比较成熟的 LiDAR(激光雷达),需要的是价格回落;一边是整体价格已经比较低的视觉捕捉方案,摄像头和平台均已出现,但是能力仍需继续积累。
当然谈到这里我们不得不去讨论另外一个问题:安全性。

在激光雷达龙头企业 Velodyne 本次 CES 展位,有一句非常明显的口号:“The only LiDAR for true safety(真正能够带来安全的激光雷达)。”可就在上个月 16 号,搭载了 Velodyne 64 线激光雷达的 Uber 自动驾驶车就闯红灯了。这也从另外一个侧面说明了视觉捕捉方案的重要性,毕竟激光雷达没有办法帮你识别交通灯和道路规则标识。
这些事实也让各大车企也都意识到了:与其继续傻傻等待激光雷达廉价化时代到来,不如我们自己现在开始做视觉捕捉技术,等激光雷达技术廉价之后,再进行更新甚至替换也来得及。
2. 核心计算平台厂商之争

图片来自 Themetropolist
无论是否自动驾驶技术主要依靠视觉捕捉,它都需要运行在一套计算平台上,面对着这么庞大的一个市场,芯片厂商们自然也不会“坐视不管”。在这次 CES 之上,NVIDIA、高通、英特尔就来了一次正面硬碰。
首先是三者中最早开展自动驾驶技术研究的 NVIDIA,目前已经拥有了 DRIVE PX/CX/PX 2/Auto Crusise/Xavier 等多款硬件平台。这些平台的大体架构都比较相似:“自行改造的 ARM 处理器 + NVIDIA 自己的图形处理器单元”。
关键就在 NVIDIA 自家的图形处理器单元身上,作为一家 1993 年已经成立的硅谷“元老级”芯片厂商,NVIDIA 在一般人心目中一直都是家消费级显卡厂商。但 GPU 的作用绝不仅仅是拿来玩游戏,它同时也是最具代表性的并行处理器。
NVIDIA 在本届 CES 上的集中发力也就不难解释了,实际上只因为 NVIDIA 早早就将建立在 GPU 上的并行计算技术玩得滚瓜烂熟,并且还根据汽车的使用场景打造出了自动驾驶汽车真正需要的形态。

这也让 NVIDIA 成为了 Waymo、百度、奥迪等自动驾驶汽车的“大脑”之选。即便是自己在尾箱中打造“大脑”的福特,也离不开 NVIDIA 生产的 GTX 显卡。
另外一方面,NVIDIA 还专门提供了自动驾驶平台开发工具包 DRIVEWROLDS,可以通过云端将所有车辆的数据汇集、重新学习、形成规律之后再返回到每辆自动驾驶汽车之上,实现一个整体性的机器学习处理,进而实现自动驾驶能力的自我提升。
即便 NVIDIA 目前已经如此强大,依旧有两个“后来者”打算杀入自动驾驶领域,他们的名字分别是:高通、英特尔。可以肯定的是,这两家在并行运算能力方面肯定比不上 NVIDIA。

首先是高通,作为目前全球最大的移动设备处理器厂家,高通的长处并不在性能本身,毕竟移动设备对于功耗有着比较高的限制。但网络基带,也就是移动网络的连接传输能力上,高通肯定有着最大的话语权。
“充分利用云端数据”也就成为了高通的第一选择。比如我们在上文介绍时提到的高清地图。本地处理器可以根据中远距离的特征点位移计算出车辆本身的方向和速度,同时再根据 GPS 与高清地图进行契合。这些高清地图数据想要完整存储在本地肯定有难度,通过网络来传输也就成为了最好的方式。至于其他自动驾驶核心功能,比如车道检测、车辆检测、行人检测,则可以分别利用更多高通处理器来完成。
唯一问题是,如何将这些数据重合最终形成最终决策?如果单颗高通处理器仍不够用的情况下,高通是否会就此制定一个全新处理器的研发计划?这些在未来一段时间都相当值得期待。
最后是英特尔,它对于自动驾驶的态度可以用“势在必得”来概括。
英特尔也是目前 NVIDIA 唯一在运算能力上面的对手,英伟达不仅拥有着目前世界上最先进的 CPU 制造技术,同时它还在去年收购了 FPGA 公司 Altera、自动驾驶软件服务商 Arynga、计算机视觉公司 Movidius 等等,阵容十分强大。
尤其是 Altera,众所周知在专用化并行计算领域,FPGA 在效率和功耗上都要胜 GPU 一筹,不过后者也有着自己天生的通用性。英特尔之前同样有着将 FPGA 融合进自家 CPU,这种“想象力十足”的方案。面对开发难度明显更高的 FPGA,英特尔很可能还需要花些时间打造一套通用的开发平台。在这一点上,NVIDIA 的 CUDA 先机非常明显。
不甘落后的英特尔也已经拿出了自动驾驶具体产品:车内云计算平台、5G 模块、云和数据中心,同时还专门打造了 SDK(开发者工具包)。
究竟是 NVIDIA 继续一路领先,还是 Intel 奋起直追,又或者是高通找到最有性价比之道?这都非常值得期待。
3. 亟待翻盘良机的小企业
这一现象主要体现在本次参加 CES 的车企当中。在电动车和自动驾驶汽车这两波“革命”出现之前,全球汽车业的份额变动其实并不算大。但也正式随着新趋势的出现,让很多车企看到了提升自己产品份额的机会。
比如短时间内已经相当完善的现代 IONIQ、以及积极与 Waymo 合作的克莱斯勒,很明显能够感受到他们对于自动驾驶技术的投入。相比之下,后面一大批概念车党的确“欠了点意思”。
需要特别明确的是,“自动驾驶”所带来的风潮肯定要比“电动车”大得多,好在目前大家起步时间都不算长,如果真的下定决心追赶,倒也不会为时过晚。
总结:自动驾驶汽车,或许来得比我们想象的更快

图片来自 thehumanitarianspace
每每当我们提到自动驾驶技术,人们总爱去分析各种硬件、设计乃至政策上面的障碍,最终得出一个结论——自动驾驶技术离我们还很远。
事实上,早在 30 年前美国卡内基梅隆大学就成功地在一辆货车上实现了自动驾驶。这辆名为 Navlab 1 的货车同样安装了激光雷达和 GPS 接收器,内部堆满了监控路况和控制空调机组的电脑,其中包括了一个 Warp 超级计算机、3 个 SUN 工作站以及视频硬件等。

图片来自 Pbase
在 80 年代末软件技术有所提升之后,Navlab 1 已经能够在树林间以 32 公里每小时的速度穿梭。反过头来看,除了体积更大,环境更简单之外,人类似乎这 30 年来似乎并没有在自动驾驶技术上面获得革命性的进展。
甚至可以反过来说,像 BB8 这种已经基本具备了行驶能力的自动驾驶轿车是否已经到达了一个“初步自动驾驶”的水平?
图片来自 Ebuyer
同时,无论是视觉捕捉技术还是更为精准的激光雷达技术,他们实现的都是“比人强”级别的驾驶能力:汽车依旧单独行动,观察环境效果比人类更强,但是传感器有可能会失效,同时也不能避免其他车辆失误之后造成的车祸。
从这个角度来看,“初步自动驾驶”这个 Level 本来就没有绝对安全可言。这个问题的唯一解是一个崭新的交通系统,车辆和道路都必须彼此联通,从而彻底改变目前单车驾驶的现状。

图片来自 Trustax
问题来了:人类究竟应该继续等待那个安全性最高的未来,亦或是放大胆先接受这种“仿人工操作”的“初步自动驾驶”?
对于很多定个更加小心谨慎的人来说,第一个或许是更优的答案。但就从本届 CES 上面新出现的产品和趋势来看,人们最终还是没能抵挡自动驾驶带来的诱惑,进入了一个不断试胆的阶段。进而推进市场和政策的发展。
这,也正是自动驾驶时代向我们继续迈进的步伐。





