






当我们在谈论自动驾驶时,我们到底在谈论什么?
如果说 2016 年上半年 VR 还可以算得上一项备受追捧的新兴技术,在 2016 年的下半年,VR 退烧后无人驾驶彻底火了。年初的特斯拉驾驶辅助致死事故将普通人的关注度吸引到了自动驾驶这里,越来越多的传统车厂、制造商和新造车运动中的互联网公司纷纷公布自家在自动驾驶领域的进展。
但究竟什么是自动驾驶?自动驾驶是通过怎样的原理和技术实现的?为什么说自动驾驶要想全面使用,人们所要发展的不仅仅是单独的无人车技术?下面这些文字试图用最简单的方式来解答这些问题。
什么是自动驾驶?
人们对于自动驾驶最早的误解,其实源于一些媒体的误读。很多媒体把 Autopilot 这一词简单简单拆解为“Auto”和“pilot”两个词汇,并将中文意思曲解为自动驾驶。

(仍然需要人类做出关键决策的特斯拉驾驶辅助系统)
然而其实 Autopilot 这个词源于飞机、列车、轮船领域的辅助驾驶系统。维基百科也给这个词做了明确的定义:
An autopilot is a system used to control the trajectory of a vehicle without constant ‘hands-on’ control by a human operator being required.
驾驶辅助是一个用来控制载具轨道而无须人工一直干预的系统。
这句话里面的关键词其实是“constant”持续的。也就是说,Autopilot 所代表的驾驶辅助系统是不需要人类持续干预的,但是仍然需要人类做出某些干预,比如关键性的决策等,机器只是在一旁辅助。

(不需要人类驾驶员做出决策的 Uber 全自动驾驶车)
而关于我们大众所认知的自动驾驶,或者说全自动驾驶,在维基百科中同样也有相关的定义。我们所认知的无人驾驶车,准确的说应该叫做“Autonomous car”。
而这一概念的定义是:
An autonomous car (driverless car, self-driving car, robotic car) is a vehicle that is capable of sensing its environment and navigating without human input.
自动驾驶车(无人驾驶车,自驾驶车,机器人车)是能自动感应周围环境并且无需人干预而自动导航的载具。
与对于驾驶辅助的定义类似,无人驾驶车概念的关键支持在于无需人类干涉。也就是说机器会自动感知,自动做出决策并且自动驾驶。

(Google 自动驾驶车)
所以这样来说,自动驾驶究竟是什么的定义问题就变得格外简单了。驾驶辅助和自动驾驶,最主要的区别在于人的参与度,前者需要人参与,而后者完全不需要人参与。
如果我们只说人的参与度的问题,就会出现界定技术是否属于自动驾驶的秃头悖论(究竟拔掉多少根头发才算秃头)。所以为了更为清晰地做出界定,美国汽车工程师协会(SAE)和美国高速公路安全局(NHTSA)对自动驾驶做了分级。为了让自动驾驶的分级更加直观,爱范儿(微信号:ifanr)整理了这样一张图表:
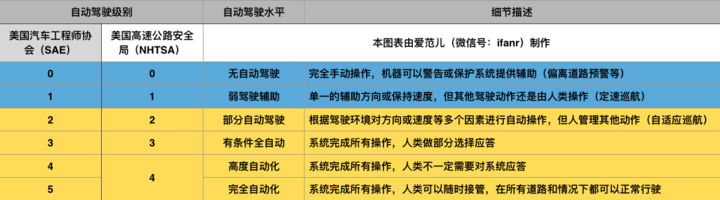
从图表中我们可以看出,我们所期望的全自动驾驶车辆其实在分级上属于 SAE 的 Level 4-5、NHTSA 的 Level 4 车型,是基本不需要人类做任何驾驶决策的。
了解了究竟什么才是自动驾驶,我们再来看看自动驾驶是通过什么技术实现的。
自动驾驶是如何实现的?难点在哪儿?
其实单纯从硬件技术层面来看,自动驾驶的原理并不算特别复杂。用最简单的话说,找一台车子来改装一下(电动车比较好改一点且性能可控性更好),加几个传感器,再塞一套开源的自动驾驶计算平台,好,这就搞定了。
- 传感器
传感器是自动驾驶车的眼睛,用于收集汽车周围的信息。归纳来看,目前主流的自动驾驶车其实也就是使用了三种传感器:LiDAR 激光雷达、摄像头、和传统雷达。

(Velodyne 激光雷达)
三种传感器各有各的优势,早就运用在车辆倒车雷达上的传统雷达成本相对较低,穿透性较强且不受雨雾等环境的影响,但弱点在于覆盖范围较小且难以对周围物体做出精准的判断。LiDAR 激光雷达的优势在于可以通过旋转的激光射线束,构建出车辆周围的 3D 影像图,但缺点是由于激光的特性,容易受到雨、尘埃、雾的影响。且最主要的,由于激光雷达加工难度比较高,产量小,所以售价最贵。一颗 64 线激光雷达的售价就得四五十万人民币。

摄像头同样也是自动驾驶车所必备的传感器,与两种雷达不同,摄像头没有任何穿透力且需要光线,用于自动驾驶的数据是通过对摄像头的图样识别得出的。不过摄像头也是最容易受到干扰的一种自动驾驶传感器,且一旦获取的图像有误差,对最终的识别结果就会产生极大的影响。唯一的好处在于成本低,且目前视觉识别的方案相对来说发展得比较成熟,做无人驾驶汽车可用的也比较多。
- 数据处理
自动驾驶车上搭载的传感器收集到的数据,都会被传输到车载电脑中进行分析和处理,最终做出决策。对于车载电脑的技术部分我们不必多说,因为自动驾驶汽车单纯从原理上真的不算是什么“黑科技”,毕竟规划路线,躲避障碍的功能目前很多扫地机器人和无人机都能实现。所以还是把关注的重心聚焦在实现自动驾驶的难点上。
自动驾驶汽车需要收集汽车周围数据,对信息进行处理并最终做出决策,这整个过程与真人司机所要完成的过程几乎毫无差异。所以训练自动驾驶汽车的过程,其实就是个从菜鸟到老司机的过程。

在人工智能技术的训练上,试错(Trial and error) 是极为重要的方式之一,人工智能通过不断的试错与纠正得到进步。但这一方式换到了自动驾驶上却几乎不可行。行车时出现的事故往往是我们不能接受的,只要出了意外,轻则损失数千元,重则导致人命伤亡。由始至终,自动驾驶汽车的关键绝非“能否做到”,而是“能否做好”;所以目前的自动驾驶技术,大部份都是用来减低犯错机率的。

然而少量的测试则隐藏着巨大的安全隐患,根据 Google 最近的资料,他们的 58 辆无人驾驶汽车合计跑了 223 万英里(约 338 万公里)才犯了一点小错,看上去出错的几率微乎其微,但乘上一个极大的基数,出现事故的数量仍是我们不能承受的。
根据调查机构 RAND 的数据,全美汽车行驶里数约 3 兆亿英里(约 4.83 兆亿公里),我们假设自动驾驶汽车,每跑 223 万英里就会发生小错,那每年 3 兆亿英里的话,就是一年之内犯了超过 160 万次错误。

还有一个重要的问题是,自动驾驶若是想要覆盖更多的地方,所要收集和处理的数据就会越来越多,不同的路况会给车载电脑带来不同的处理变数。而当人类驾驶和自动驾驶车同时行驶在路上时,不确定性就更高了,自动驾驶车做出决策的难度也会大大增加。
尽管目前自动驾驶技术仍然还在发展,但已经给了人一个足够美好的希望,那就是经过训练的自动驾驶车的驾驶技巧要比人类更好、更符合规定、反应更快。很多目前交通系统上存在的顽疾也可能因为自动驾驶的到来迎刃而解。
自动驾驶能减少交通事故吗?这必须需要整个交通生态的改变
我们可以把交通事故的问题与交通拥堵的问题放在一起来看,理论上来讲,这两个问题的起因在于人类驾驶员的失误。如果驾驶技巧更高的自动驾驶汽车介入到交通系统当中,那些人类可能出现的失误将会被避免,可能出现的交通事故也被减少了。
然而事情并没有像理论上看上去那么简单。我们可以做个类比,地铁这种轨道交通,其实可以算得上是一个系统封闭、不容易受到干扰、高度自动化仅有少部分依赖人类驾驶员的交通方式。然而由于各种迷之因素的干扰,比如有乘客卡在门里或者突然某一节车厢出现了故障,整个地铁系统仍然有可能被打乱陷入瘫痪的境地,更不用说是现在还没有上路的自动驾驶汽车了。

现在已经有不少厂商公布了自家的无人车计划,几乎都是计划在五六年之后让自动驾驶车正式上路,先从商用做起,再逐步民用。所以这么来看,自动驾驶汽车完全替代人类驾驶员之前,一共会先经历这样 2 种阶段:“商用自动驾驶专车”、“少量民用自动驾驶车和商用自动驾驶专车”。当然,自动驾驶车是否真的会彻底取代人类驾驶员则是另一个层面的问题,毕竟人们可能并不会放弃传统汽车的驾驶乐趣。就像我们现在即使习惯开车,仍然有不少人喜欢骑马,只是不会正式上路。

目前各家厂商所公布的基本都是自家单独的自动驾驶汽车产品。然而对于整个交通系统来说,车辆仅仅是很小的一部分。目前来看,自动驾驶技术不止是传统汽车的一项升级,更应该是一项大工程。这包含了汽车改造、社会基础设施建立、法律法规推动,甚至还有交通人的责任认定变迁、驾驶人行为习惯的改变等。这些不是无法克服的困难,但也需要一个逐渐接受的过程。未来自动驾驶将会是出行方式,更是整个交通产业的升级。

就像我们现在的道路交通系统基本上就是为了各种机动或者非机动的“带轮子的”的车所设计,原本留给马车的道路就是被取代了。如果想要自动驾驶系统真正进入普通人的生活,真正要改变的远远不只是汽车技术单独一项。
单独的汽车运算能力再强,反应再快,本质上也仅仅是人类驾驶员能力的延伸。真正能让自动驾驶引发交通领域革命的,其实是物联网技术。当整个交通系统联网到一起,而不是像现在一样由一个个单独的运算个体(包括人类)组成,整个交通的效率将会有革命性的提高。

至于未来交通的样子究竟会是什么样?其实可以想象出这样一种场景:
每一辆自动驾驶汽车都知道相互的位置与速度,不会因为并线变道干扰到其他车辆,自动驾驶车也会实时读取出发点到目的地的道路拥堵状况,实时选择最佳路线以及避免过多红灯,车辆也会感知到行人的位置,避免出现车祸。只有实现了这样的高效率运作,自动驾驶才会真正有效避免拥堵和交通事故。
只不过到那个时候,恐怕人们要担心的就不是交通事故与拥堵,而是保障整个交通系统联网的绝对安全,避免网络被黑客干扰。





