






我们不需要“无人驾驶”
我们似乎非常需要安全、高效、快速且智能的汽车,所以看起来我们很需要实现无人驾驶。
“安全、高效、快速且智能”这几个词实质上表明了我们的懒惰,我们希望能通过各种工具完成这些本该需要我们来玩成的工作。如此说来真正“需要”我们做的事情是什么呢?
这是一个非常宏观、枯燥且残酷的问题。为了让幻想变成思考、让欲望变成知识,我们有必要全面的了解一下无人驾驶技术。
起源
正本清源,其实防抱死制动系统可以说是“最早”的无人驾驶技术。
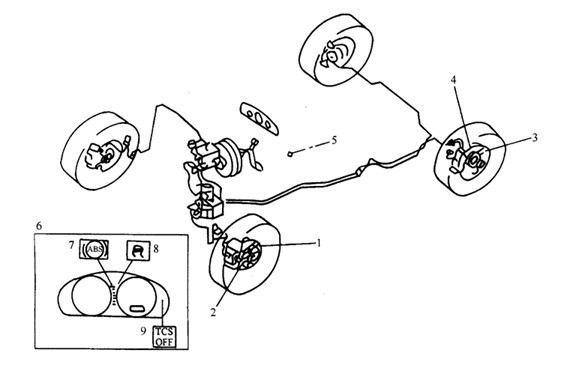
如果驾驶员在车辆行驶中猛然踩下制动踏板,车轮转速会迅速降低,当制动力超过车轮与地面的摩擦力时,车轮就会被抱死,于是轮胎与地面的摩擦力会下降。一旦出现抱死的情况,驾驶员将无法控制车辆的行驶方向,或者出现侧滑现象。
防抱死制动系统(Anti-lock Braking System,简称 ABS)的出现就是为了克服这个问题。这套系统可被安装在任何带液压刹车装置的汽车上,通过安装在各车轮或传动轴上的转速传感器不断检测车轮的转速,由车载计算机算出当时的车轮滑移率,与理想的滑移率相比较,增大或减小制动器制动压力。一旦传感器发出车轮将被抱死的信号,控制器指令调节器降低该车轮制动缸的油压,减小制动力矩,然后恢复原有的油压,如此循环(每秒可循环 5~10 次),让车轮始终处于转动状态而又尽可能地使车轮可控。
ABS 可以监控轮胎情况,了解轮胎何时将被锁死,并及时做出反应,其反应速度与时机把握超过驾驶员。因此,我们可以认为 ABS 系统是引领汽车工业朝无人驾驶方向发展的根源之一。
1906 年首项有关 ABS 的专利出现,1936 年博世(Bosch)注册了一项防止机动车辆车轮抱死的机械专利,1947 年世界上第一套 ABS 系统应用于美国 B-47 轰炸机上。Teldix 公司在 1964 年开始正是研究这个项目,但很快被博世全部接管。在其后的两年内,首批 ABS 测试车辆已具有缩短制动距离的功能。
如此看来,对无人驾驶技术的粗略理解应该是:驾驶员在机械和计算机的帮助下完成驾驶任务。听起来似乎还没达到“自动”的程度,只是辅助驾驶员更好地完成汽车行驶的部分缓解,但已经具备基本的雏形,这些技术的使命是——辅助\修正驾驶。
而另一种对“自动驾驶”概念的解读则完全不一样,比如在 1939 年的纽约世博会上,美国通用展出的全球一台无人驾驶电动汽车,它通过嵌在道路里的电路获得电力,用无线电进行控制——这是一套更为“庞大”的系统,本质上也更贴合“自动驾驶”的核心概念。
现状
在前不久的 CES 上,许多汽车厂家相继推出了自家的智能驾驶系统,比如爱范儿曾报道过的雷克萨斯“先进主动安全研究车辆”平台(Lexus Advanced Active Safety Research Vehicle)。
此平台被安装在一辆雷克萨斯 LS 600 上,与车载 GPS、雷达、激光测距仪和立体相机(Stereo Cameras)等外设相配合,外加超精准里程表和可存储数据的加速器。这一套装备可以侦测到汽车周围的环境变化,甚至能够判断红绿灯,从而帮助驾驶员修正驾驶,但尚未完全实现自动驾驶功能。此设备还采用了一项名为“智能传送系统”的通讯技术,它能够让车辆与公路网络上其他车辆进行信息交换。
还有福特的车载多媒体通讯娱乐系统—— SYNC,它是由福特、微软和大陆航空(Continental)共同开发,于 2007 年首次亮相北美国际车展。早期的 SYNC 系统只能够通过蓝牙、USB 驳接等方式将车主的手机、媒体播放器等设备集成到车载信息终端上,后来 SYNC 增加了车辆健康状态检测和自动接通紧急救援电话的功能。目前最新的 SYNC 则集成了交通监测和移动导航,也可以起到修正驾驶的作用。
福特 SYNC 系统是现在唯一可以通过语音来操作智能手机软件的汽车应用。这套系统可以兼容 iPhone 、Android 和 BlackBerry 等智能手机的应用。车主通过在智能手机上安装相应的 AppLink 软件就能使用语音和中控台上的触摸屏来控制手机上的应用。

另外,克莱斯勒也在 CES 上发布了其娱乐信息系统——Uconnect 的升级版,这套系统将搭载在克莱斯勒 2013 款车型中。升级后的 Uconnect 娱乐信息系统能支持收音机、多媒体、导航、电话和移动应用,甚至还可以控制座椅加热和空调。克莱斯勒在此次 CES 上还发布了 Uconnect Access via 移动系统,支持 WI-FI 上网、短信发送、紧急救援、车辆遥控等(能够遥控点火、开门和锁门),并且支持 bing 搜索。
智能化的风潮也影响了奥迪,其也在 CES 上宣布正积极研发并拟于 2015-2020 年间推出一套辅助驾驶系统,这套系统能让驾驶者在车流拥塞、车速缓慢的路况中切换到“半自动”模式,从而让汽车不断变速,让汽车以合理的车速在车道上行驶。通用也在目前的低速巡航系统的基础上,在 SRX 等高端车型上推出了能在时速 60 英里运行的“超级巡航”功能,预计在 2015 年左右投放市场。
通过以上实例,我们发现目前的智能驾车辅助系统已经趋于完善,各个领域和功能的进化也在齐头并进,但丰田北美业务部总经理 Jim Pisz 在接受采访时则表示:“自主驾驶(Autonomous)并不等于无人驾驶……科技的发展应当以帮助驾驶者提高驾驶技术为主旨,但我们依然相信目前的技术水平已经能够达到自动纠正驾驶者错误的水平。”
前沿
目前,和“真正”的无人驾驶技术“离得最近”的应该是 Google。
Google 从 2011 年10月开始在公共道路上实验无人驾驶汽车,去年 3 月获得内华达州许可并于 5 月 7 日获得牌照上路。
在此之前,谷歌的 7 辆无人驾驶汽车从北加州 MountainView 出发,穿越南加州的好莱坞、金门大桥、太平洋海岸高速公路、塔霍湖以及旧金山 Lombard 大街等标志性的地方,在各种路况下累计行程超过 20 万英里,其中超过 1600 英里是在“完全无人驾驶”的情况下行进的。期间没有发生过大的交通事故,仅被后方刹车不及的车辆追尾一次。

位于该车车顶的 64 束激光测距仪能够提供 200 英尺以内的 3D 地图数据,车载智能系统会把外置设备收集到的数据和电子地图相结合,绘制出数据模型。安装在前挡风玻璃上的摄像头可以让汽车发现障碍物,识别街道标识和交通信号灯,外加汽车前后保险杠内装载的 4 个车载雷达,可以更清楚地查看周围的情形。轮胎上的感应器可以跟踪汽车的行进轨迹,并精确地测量和控制速度。“无人驾驶”并不等于完全脱离人的控制,而是可以让驾驶员坐在车内尽可能地做最少的事情。汽车行驶得越多,智能化水平就越高。
虽说 Google 的自动驾驶汽车运用了比较完整的概念,但其实这辆车在技术上并没有太大突破,其核心部件都是当今全球一线供应商已经掌握的,多数已投放市场。Google 真正的优势在于其数据中心和操作系统,它可以处理汽车在测定路况时产生的海量信息。通过结合强大的地图数据、操作系统和先进汽车主动安全技术,Google 可以更好地方式出售其地图服务。
Google 的无人驾驶概念并不等于“无人驾驶汽车”概念,其核心是一整套系统,车辆只是这个系统中一个变量而已。反过来想,要想实现真正的“无人”,紧靠单个车辆的“智能”可以说是天方夜谭,但将视野扩大,我们发现所谓的“无人驾驶”也只是人类预想中整个社会系统不断更新进化的一道剪影而已。另外,Google 表示无人驾驶汽车要投放市场还需要 8-10 年时间。
愿景
美国电气和电子工程师协会(IEEE)在近期的一份报告中大胆预测:到 2040 年,全球汽车总量中的 75% 将会是无人驾驶汽车。而交通规则、基础设施、人民意识都将随着无人驾驶汽车的出现而发生剧烈的变革。
IEEE 表示,当路面上全是无人驾驶汽车时,红绿灯等交通指示灯将会失去存在的意义。届时十字路口都会安装各种感应器、监控探头和雷达,可以进行实时监控,实现交通流量控制、交通事故预警和突发事件的快速反应,交通系统将会更加流畅。高速路车道将分成无人驾驶和传统驾驶两类,这样可以减少交通拥堵,还可以增加汽车车速。
另外,IEEE 还认为今后可以实现人车、车车“交流”。

其实目前车辆间沟通已经实现。比如前文提到的雷克萨斯“先进主动安全研究车辆”平台,此平台中内置的“智能传送系统”的通讯技术能够让车辆与公路网络上其他车辆进行信息交换。另外,沃尔沃公司近期在欧洲测试了“道路火车”概念,即根据汽车数量、速度和道路路面面积进行智能分配,令汽车车流如火车道路系统般高效且可控,同时能减少油耗。
IEEE 相信,到本世纪中叶前,交通系统概念将迎来一次完全的革新。
撇开技术问题不谈,有人认为此技术在付诸实践上还得综合考虑其他因素,如电子病毒、复杂的路况路障条件及政治军事因素。综合这些因素,无人驾驶技术想要真正普及并形成系统,恐怕路还很长。
结语
看到这里,也许读者会由疑问——这些内容和标题有什么关系?
其实,以上提及的诸多技术和概念,本质上是在弱化“车辆”的概念,通过克服自然条件和人为因素以求构造一个智能的“物流”系统。这个系统由人类主导,克服来自于人类带的问题,然后不断弱化人类发挥的作用,实现最为根本的“控制”。
所以“车友”的概念将会消失,汽车文化将会变成真正的“文化”,人类赋予车辆的一切附加值只会剩下“收藏价值”这一项,换来的是直接、机械、高效、安全的巨大网络。先进,但我们不需要。

不过,它终究会成为现实。





