






以章鱼为目标,“柔性机器人”水下行走
想让机器人变得柔软一点?即便机器人的头是个大屏幕,作出种种漫画式的表情,它的身躯依然冷冰冰、坚硬的金属。
为了让机器人拥有柔软的外表,不信邪的科学家们花费孜孜不倦地数年,研制“柔性机器人”——它是指柔性材料制造的机器人,可以移动、可以抓东西、可以完成指定的任务。2007 年,欧洲研究机构 BioRobotics 开始涉足“柔性机器人”领域,最新的研究项目是模仿章鱼的水下机器人 PoseiDRONE。
PoseiDRONE 外形和章鱼相似,由头部和四个腕足组成,腕足伸展开来长度达 78 厘米,重量为 0.755 公斤,76.4% 的身躯有由柔软的人造橡胶构成。
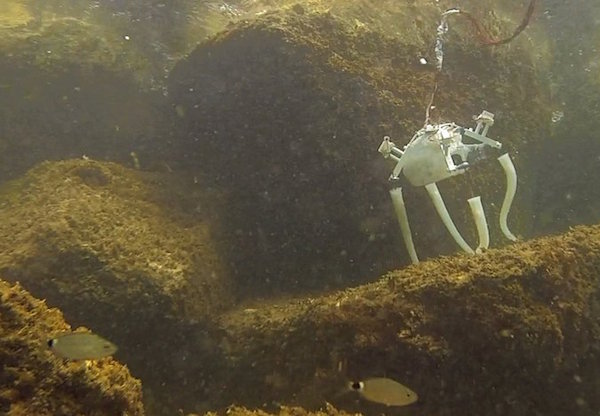
它的动力来自两个不同的直流电机,一个用于爬行,一个用于游泳。PoseiDRONE 的运动方式也模仿章鱼,如果是爬行,它会用到四个腕足,而如果是游泳,它则会喷出水流令自己前进。尽管 PoseiDRONE 在水下工作时,依然需要拖着一条电缆,但是它已经可以自如地在水中游泳,以及在海底的石滩上爬行。
“柔性机器人”为什么重要?能够改变身体的形状,这让机器人拥有很高的灵活性,能够适应更多复杂的环境。比如说现在流行的扫地机器人,因为形状固定,难以照顾家中的小角落。以 PoseiDRONE 为例,它未来的应用潜力,主要是水下作业,比如检查/修复涡轮机、原油设备、船体之类。而和一般水下机器人不同的是,PoseiDRONE 可以在不破坏任何装备的情况下,攀附在任务目标上,而不只是绕着转圈。
根据纽约时报的报道,PoseiDRONE 的目标还不只是模拟章鱼的运动方式而已,真的要成为章鱼的机器版本——它希望最终拥有章鱼一样几乎无线灵活的的 8 条腕足,能挤过比它的嘴稍大一点的空隙,到其它地方去,以及复杂的神经系统,可以让腕足拥有半自主性的反应,以及向腕足下达命令的大脑。
实际上,在欧洲以章鱼为原型的机器人开发社区里,数年前已经利用“人工肌肉”技术研发模拟章鱼腕足的机器臂,在水中它可以不光可以伸长、缩短、还可以作出推和抓取等动作。
BioRobotics 在 2012 年开始研发 PoseiDRONE,到 2014 年 已经取得如此成果,希望 2015 年项目期限到来之前,PoseiDRONE 真正成为一只灵活的机器章鱼。
题图来自 cerebrovortex





