






这家公司连产品都没面世,凭什么值 45 亿美元?
Magic Leap 可能是世界上最神秘的初创公司了。
如果你不知道炙手可热的 Magic Leap,请一定要先看下面这个 Demo 视频。然而,令人匪夷所思的是,世人对于 Magic Leap 的了解也仅限于这几个视频——除了零星的几个人体验过原型产品,外界对 Magic Leap 技术的了解几乎都是猜测。
但另一方面,这家公司却在近两年内完成了一轮又一轮的融资,而且每轮金额都水涨船高,背后的投资方也是大有来头,这让 Magic Leap 充满了争议。
(视频下面的文字显示,片段是直接透过 Magic Leap 技术来拍摄的,没有特效或合成)
2 年 3 轮融资,估值 45 亿美元
从 2010 年创立至今,Magic Leap 在 CrunchBase 上有记录的融资共 3 笔。2014 年 2 月完成了 5000 万美元 A 轮融资。
2014 年 10 月完成 5.42 亿美元 B 轮融资,Google(而非 Google Ventures 或 Google Capital)领投,Kleiner Perkins Caufield & Byers(KPCB), Andreessen Horowitz, Qualcomm Ventures, Legendary Entertainment, Obvious Ventures 跟投。
2016 年 2 月完成 7.935 亿美元 C 轮融资,阿里巴巴领投,Wellington Management, T. Rowe Price, JP Morgan, Morgan Stanley, Fidelity Investments, Warner Bros., Qualcomm Ventures, Google 跟投。
C 轮融资后,Magic Leap 总融资金额达到了 13.9 亿美元,估值达 45 亿美元。Magic Leap 负责感知研究的高级副总裁 Gary Bradski 曾在其他媒体的采访中提到:
基础的、改变世界的研究性工作是需要时间的,需要金钱支撑的。Magic Leap 希望在早期融资中拿到足够支撑这件事情到最后的钱,而不希望制造短期的里程碑导致研发进程受阻。
钱多人气旺,大牛数不过来
Magic Leap CEO Rony Abovitz 是一位连续创业者,1997 年创立了医疗设备公司 Z-KAT,2004 年将 Z-KAT 其中的机器人部门拆分出来,成立了新公司 MAKO Surgical Corp,瞄准机器人医疗市场。2013 年,MAKO 以 16.5 亿美元的价格销售给了 Stryker。
在出售 MAKO 前的 2010 年,Rony Abovitz 又创立了 Magic Leap,开始研发他们称之为 Cinematic Reality (电影级现实)的技术。

(Magic Leap 创始人 Rony Abovitz)
Magic Leap 笼络了一批计算机视觉、艺术设计、游戏、动漫和 CG 等多个领域的专家。
Magic Leap 负责感知研究的高级副总裁 Gary Bradski 是计算机视觉领域的领军人物,在英特尔和柳树车库创造并发展了 OpenCV。OpenCV 是一个开源跨平台的计算机视觉库,可以实现许多图像处理的算法。
计算机视觉技术负责人 Jean-Yves Bouguet 也是计算机视觉技术的大牛,原先在 Google 负责街景车的制造,同时是 Indoor Street View 项目的负责人。
艺术设计、游戏和动漫方面的人才有前苹果游戏设计师 Graeme Devine,漫画书作者、电影《守望者》的 co-creator Dave Gibbons,《System Shock》、《Deus Ex》、《Dishonored》等知名游戏的作者、设计者 Austin Grossman,《葛保諾博士的科幻世界》的设计师、创造者 Greg Broadmore 等。
公司目前董事会的成员包括 Magic Leap 创始人 Rony Abovitz、Google CEO 桑达尔 · 皮查伊(Sundar Pichai)、维塔工作室联合创始人理查德 · 泰勒(Richard Taylor)、阿里巴巴副董事长蔡崇信。
这其中,理查德 · 泰勒是世界著名电影特效大师,参与过《指环王》、《金刚》、《阿凡达》、《霍比特人》等电影的制作,获得过 5 座奥斯卡小金人。泰勒在中国有 17 年的商业经验,在 Magic Leap 中也是负责维护中国地区创意社区的关系。
技术保密严,看看专业人士的猜测
Magic Leap 此前将自己的技术称之为 Cinematic Reality (电影级现实),后来也叫做混合现实光场(Mixed Reality Lightfield™ )。
之前曾有过不少媒体报道 Magic Leap 不需要佩戴眼镜,包括我们爱范儿也出了一篇。这已经被证实是一个误会,“还是要戴眼镜的,裸眼的话成巫术了,不科学”。
我们参考了知乎用户 Botao Amber Hu 在一个相关问题下的回答、资深 VR 从业者台伯河的文章、以及外媒 Gizmodo 的报道等多方资料后,得出了一个具有相当可信度的技术原理猜测:
Magic Leap 利用了光纤投影技术,光纤直接向视网膜投射整个数字光场产生图像,同时它能够感知周围的环境,对用户进行定位以及构建 3 维世界,让用户和现实世界做出交互。
这里面涉及了 3 个要点:光场、光纤投影显示、感知周围的环境。
光场
1846 年,迈克尔 · 法拉第首先提出光应被理解为一个场,就像磁场一样。此后,Alexander Gershun 于 1939 年在一篇经典论文中明确提出了光场这一概念。
E. H. Adelson 和 J. R. Bergen 在上世纪末的一篇论文中完善了光场这一概念,并给出了全光函数 (Plenoptic Function) 的形式,可以描述空间里每一个点、每一个方向射过来的光线数量。
简单理解,即是空间中任意点发出的任意方向的光的集合。
完整描述光场的全光函数是个 7 维函数,这里不详细展开。在实际应用中,只关注光线的方向和位置就可以了。通常分别用两个平面上的两个点表示光线经过的两个点,这样一来光线的方向和位置都可以确定,并且维度降到了 4 个。
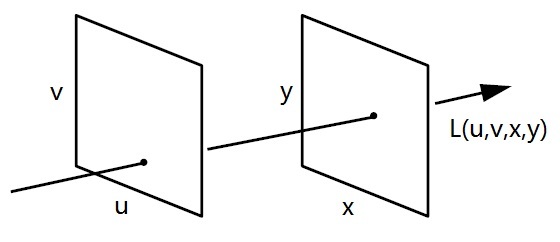
(光的 4 维表示)
传统平面显示器只有一个平面,每个像素上所有方向的光的信息都叠加到了一个像素点上,因而只能显示 2 个维度的图像,另外 2 个维度方向信息是有所缺失的。而 Magic Leap 是向人的视网膜直接投射整个 4 维光场。
由于 4 维光场还原了所有的信息,Magic Leap 能让人眼主动选择性聚焦,眼睛看哪里,哪里就实,焦外的地方变虚。这还不需要任何人眼追踪技术。
光纤投影
前面说到,Magic Leap 不是魔法,还是需要佩戴眼镜的,其显示图像解决方案是光纤投影。
Magic Leap 在光纤一端放置了一个微镜头阵列(microlens array),用于生成 4 维的数字光场。另一端采用光纤投影的方法将 4 维数字光场直接投射在人的眼球上。
这个解决方案灵感来自于光纤内窥镜。光纤内窥镜的原理是,利用压电传动装置震动光纤束的顶部,使其高速旋转,扫描出高分辨率的图像。下面视频是华盛顿大学教授 Eric Seibel 的解释,他研究光纤内窥镜已经 8 年了。
(Eric Seibel 教授解释光纤内窥镜原理)
Rony 曾经创立医疗机器人公司 MAKO,曾经用到 Eric Seibel 博士的技术也不足为奇。“Magic Leap 的创始人比较聪明的地方,是找到这些做高分辨率光纤扫描仪的,由于光的可逆性,倒过来就能做一个高分辨率投影仪。”知乎用户 Botao Amber Hu 在回答中写道。在 Magic Leap 做光纤投影的人是 Brian Schowengerdt,他的导师正是 Eric Seibel 教授。
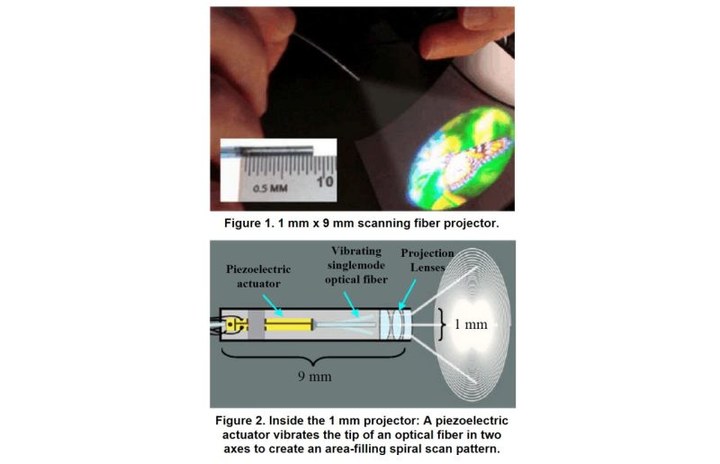
光纤投影设备尺寸非常小,1mm 宽 9mm 长的光纤就能投射几寸大的高清蝴蝶头像,为 Magic Leap 眼镜做小做轻提供了可能。
感知周围环境
Magic Leap Demo 视频中的第一个片段,小机器人藏在桌子底下,被看到了还会打招呼。设备想要渲染出这样一个小机器人,就需要知道“桌子”是什么、在哪里,才能够正确的构造出小机器人和桌子之间的位置关系。
第二个片段中,桌子上有一个虚拟的太阳系,桌面上有太阳的反光,这需要设备知道桌子的三维结构和表面信息。

简而言之,Magic Leap 的眼镜需要具备两个功能:定位和三维世界构建。
Magic Leap 负责感知研究的高级副总裁 Gary Bradski 曾在斯坦福的招聘会上展示了 Magic Leap 在感知部分的技术框架和技术路线,以 Calibration(图像或传感器校准)为中心,展开成 4 支不同的计算机视觉技术栈。

(图片来自知乎用户 Botao Amber Hu)
详细的技术细节请移步知乎用户 Botao Amber Hu 的回答,这里简单说一下 Magic Leap 可能用到的 SLAM。
SLAM 是一门基础技术,全称 Simultaneous Localization And Mapping(即时定位与地图构建)。设备进入了一个未知的环境中,通过各种传感器(激光雷达、深度摄像头、光学摄像头、惯性传感器)的融合,能够即时地定位自身并且构建出周围环境的计算机模型。Google 的 Project Tango 就用到了这样的技术。
目前 3 个火热的技术趋势无人机、无人车和 VR/AR 都应用到了 SLAM 技术。
对于 Magic Leap 来说,上面说到的光场、光纤投影以及感知技术解决了两个最重要的问题:一,如何处理虚拟图像与人眼的关系;二,如何处理虚拟图像与周围环境的关系。
在这之后,计算、电池、交互等问题都有待 Magic Leap 逐个解决。估值 45 亿美元的 Magic Leap 是个大忽悠还是变革性的技术,只有看到产品后才知晓。





