






百度自动驾驶技术剑指 Google 无人车,搞投资、弄路试,还拉上英伟达来合作
在上个月宣布与福特共同投资激光雷达公司 Velodyne 以及在周末进行了一场无人驾驶“路考”后,在昨天的 2016 百度世界大会上,英伟达 CEO 黄仁勋宣布:百度将与英伟达合作开发自动驾驶平台,平台将基于云计算高清地图以及对不同道路环境进行感知和做出反应的能力。
当然,此次百度与英伟达合作研发的自动驾驶平台,将不仅仅会使用在百度自动驾驶汽车上。黄仁勋表示:这是一个“完全开放”的平台,意味着百度与英伟达都非常希望其他汽车 OEM 厂商能够加入到当前的研发队伍当中。

近期百度在无人驾驶汽车领域一系列的明显动作能够显示:百度在试图成为国内公司在无人汽车领域的龙头老大,并且有意在无人汽车的快速发展过程中跑马圈地,为未来这一领域的庞大市场做技术积累投资。
不是自己造车,百度的最终目的是成为技术出口方

从百度目前公开披露的几次无人驾驶汽车测试可以发现,虽然每次测试车辆都使用的是不太好看但很醒目的红白涂装,但几次使用的测试车型都不一样。从巡航在北京五环的宝马 3、到载着狗狗进行路考的奇瑞,再到摆在昨天论坛会场外的北汽。这些车辆唯一的共同点就是车顶的激光雷达传感器以及车辆搭载的百度无人驾驶技术。
与其打造自己的自动驾驶汽车,不如让自己的自动驾驶技术配适更多种类的车辆。出口技术而不是打造硬件,这是百度无人汽车发展的主要思路。
在论坛中,百度放出了自己所认为的自动驾驶中必须的十大技术:
环境感知、行为预测、规划控制、操作系统、智能互联、车载硬件、人机交互、高端定位、高精地图、系统安全。
其实把这所谓的“十大技术”简单分类,就会发现,归根结底就是三类:地图的扫描与建模、数据的运算以及车载智能系统。

在地图扫描和建模方面,百度和福特一起投资了 Velodyne 激光雷达,激光雷达是目前无人驾驶技术的必备硬件,通过激光雷达的高速扫描得出的数据,运算系统才能够对外部环境进行建模定位,之后对无人驾驶汽车进行控制。但目前激光雷达的成本很高,大概每一台自动驾驶汽车上使用的激光雷达成本就会达到 8 到 10 万,百度与福特的这次投资,就是为了降低激光雷达的生产成本,把控住全自动驾驶汽车领域中这一核心之物。
对建模、运算数据方面,就不得不提百度与英伟达的合作,以及英伟达在自动驾驶领域的努力。在今年年初的 CES 电子消费展上,英伟达发布了一套具有学习功能的全自动驾驶技术。

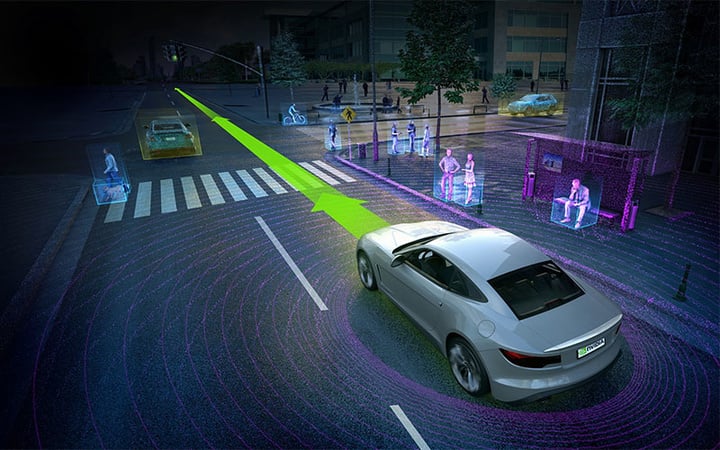
与市面上常见的自适应巡航系统所实现的半自动驾驶技术不同,英伟达所开发的自动驾驶系统是首先通过传感器收集数据,再通过自家的 GPU 进行分析学习并指导汽车自动行进。

此外,这套技术还能够监控路面上的其他车辆类型、速度等信息,通过数据处理分析每辆车的行进轨迹、速度、车辆类型,实时给出最佳行进方案。经由传感器收集到的数据越多,GPU 能够分析的更明确、更精准。这就是大数据和深度学习能给自动驾驶数据处理带来的从量变积累到质变的过程。而百度刚好在大数据和深度学习上有比较好的技术积累,更重要的是,百度在高精度地图上的积累,是英伟达所缺少的,能吸引到在近两年但凡露面必谈深度学习的“核弹厂厂长”黄仁勋的合作意愿也显得合情合理。

其实有了这两大方面的技术,就能够实现无人驾驶汽车的基本控制,至于剩下的第三大类:车载智能系统,无论是目前被人熟知的苹果 CarPlay 还是 Android Auto,亦或是目前各家车厂开发的车载系统,在目前的技术下已经可用性较高。属于让汽车更好开的人性化设置,实现难度并没有对自动驾驶控制的研发那么高。
对于百度和英伟达这样的科技圈大厂,想要涉及到已经传承百年的传统汽车制造业,不如专心于研究无人驾驶方案,之后将整套方案用在汽车厂商的设备上。
如果把未来的无人驾驶汽车比作一个手机,传统车厂将更多担任 OEM 硬件厂的责任,而百度和英伟达所开发的无人驾驶系统,就像是手机中的系统。
但让无人驾驶汽车跑满大街究竟有多难?
无人汽车有多火热,这个问题的讨论就有多激烈。
无人驾驶汽车无论如何也不只是一个汽车厂或是几家科技公司的技术生意,车辆既然无人了就需要考虑汽车与环境、汽车与人以及汽车与汽车之间如何互动的关系。
大方向看,无人驾驶汽车的目的不应该仅仅是为了酷炫,而应该考虑的是未来汽车利用率、土地资源的合理利用以及社会智能设施建设的多重问题。

各家厂商公布的 2021 年或者 5、6 年后实现自动驾驶正式商用或民用,在现在看起来虽然不太遥远,但仍需要的不仅仅是无人驾驶技术的发展,还需要的是人们对于无人驾驶看法的改变以及整个交通路径形态对自动驾驶汽车的优化和改变。
不过,在自动驾驶汽车真正走进普通人家之前,看着各大厂商在技术上的发展和竞争,还是很鼓舞人心的,能让人对未来的出行充满憧憬。当然,在全自动驾驶完善之前,不如先发展处更好的辅助驾驶,少量的人为介入近乎全自动的机器辅助驾驶,仍能给人们带来比较高的驾乘幸福感。





