






Depth-VR 创始人李今,VR 产品有可能像鼠标一样便宜
本文来自爱范儿旗下创业社区 MindStore 的“MindTalk 线场”栏目。如果希望参与到 MindStore 栏目报道,或者有相关项目推荐,请将产品提交到 MindStore.io。
最近,VR 成为最热门的科学技术,各行各业争相开发 VR 产品,期望掌握科技变革的先机。
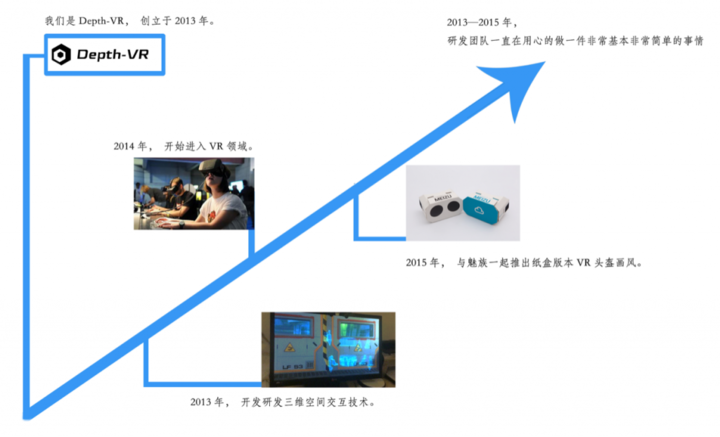
在这股 VR 潮流刚兴起时,Depth-VR 公司早已先发制人,在 2013 年就开始研发 VR 的位置跟踪系统。
然而在最开始,Depth-VR 只想做类似亚马逊 Fire Phone 的一套系统,主要的原理是通过红外线跟踪用户的眼睛,再生成视觉的图像,但产品并没有成功。
2014 年 VR 开始爆发,Depth-VR 毅然转变方向专注研发 VR,却在中间不小心走一段弯路,跑去做头盔,跟魅族联合推出轻便版手机 VR 头显“画风”。
Depth-VR 的 CEO 李今在 MindTalk 分享时坦言,创业公司的身份,让他们一直频繁地转变方向。但是对光学的位置跟踪技术,即现在大热的 VR 交互技术,是他们从 2013 年就开始坚持研发的方向。
(图片来自嘉宾分享)
做 VR 的缘由,最初来自于玩游戏时的异想天开
Depth-VR 如今能站在交互领域的领先地位,最初却只是来源于一个异想天开的想法。
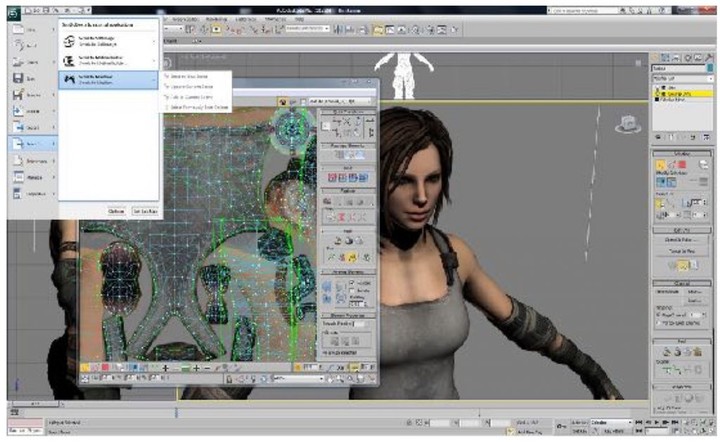
大学时候就喜欢玩 CS 的李今,迷恋上制作 3D 游戏。但是最开始用 3D-MAX 做 3D 游戏时,跟大部分初学者一样,他遇到建模困难的问题。
(图片来自嘉宾分享)
“ 3D-MAX 的界面比较复杂,一般人上手太困难,学习周期需要三四个月的时间。学软件之难,甚至会让使用者把大部分精力投放在三维建模上,而不是创作上,这是非常不合理的。”
于是李金开始思考,怎么改变建模交互的方法。
一心要把 3D 简化实现,无奈想法错误终落空
2011 年,Depth-VR 开始深入研究 3D 建模软件,发现三维建模的工作流程之所以复杂,是因为操作的本质是用二维平面输入建立三维的信息。
于是 Depth-VR 打算做一个便宜廉价的输入系统,它能够代替鼠标捕捉手的空间位置。他们甚至会幻想像《钢铁侠》里面做模型的绘制,所有建模操作能在空中操作,当时 Depth-VR 的构想跟 AR 相关。

(图片来自嘉宾分享)
“我们当时就想做一个三维的输入系统,让计算机能够知道你想表达的是一个什么意图,非常直接的表达你三维的操作,而不需要通过鼠标去表达。 ”
不幸的是,李今不久后发现他们的想法是错误的,三维建模系统的重点根本不在输入,而是视觉输出的可视化这部分,最后项目只能暂时搁置。
转变方向,把过去的思路和技术积累用在 VR 上
直至 2014 年 Oculus 的出现,Depth-VR 才受到了启发,尝试把从前的思路和技术积累用在 VR 上。

(图片来自嘉宾分享)
他们要做的 VR 位置跟踪技术,跟从前的技术要求不一样。
“Oculus Rift 第一代 DK 出来的时候还没有头部位置跟踪,也没有提出位置跟踪的概念,只有一个计算机系统的输出端,但是完整的计算机系统是需要输入和输出两个的,输入当时没人做。所以我们决定做输入的环节,这样才能让 VR 变成一个完整的计算机系统。”
但是 VR 交互技术,在 2014 年的时候仍然是个又贵又冷门的玩意儿。
当时消费级的三维输入只有 Leap Motion,其捕捉范围太小,只能跟踪手的运动。

(图片来自嘉宾分享)
其实 VR 里最重要的位置是头部,假设在 VR 场景里,你要拿较远的一瓶水,当你移动身体的时候,瓶子要离你越来越近,而不是跟着你的头一起动。所以位置跟踪尤为重要,它是 VR 系统实现的重要条件。
所以在 2014 年的时候,Depth VR 就开始正式做 VR 的位置跟踪系统。
要做优秀的 VR 位置跟踪系统,需要满足几个条件
第一要范围够大,才在 VR 场景里到处跑,然而这对位置跟踪技术有着很高的要求,捕捉范围要足够大,至少要有 4×4 米的空间范围才能实现场景运动和正常移动。
第二,精度的要求要高。除了空间位置要有较高的准确性,最重要的是减少位置跟踪系统的抖动幅度,所谓抖动,正是源自系统里的噪音,例如图像的噪音。而光学追踪能避免系统噪音带来的影响。
“我为什么要说精度和范围的问题呢?因为这两个东西加起来就构成了位置跟踪系统的体验。体验这个东西是很微妙的,它是由人来定位的。人又没有一个标准,人的标准永远是既苛刻,又很模糊,说不清的一个东西。”
除了精度和范围,实现 VR 交互系统,还需要关注最后一点——延迟。延迟是指用户真正的运动和他看到画面运动时的时差,这又决定了 VR 的体验。
当初除了以上的硬性指标, VR 位置跟踪系统的产品还要足够便宜。在李今看来,鼠标跟 VR 位置跟踪系统类似,是同一个级别的输入设备,差别在于,鼠标相比于三维的位置跟踪系统而言,它输入的是二维的一个坐标。
“我们可以通过鼠标的定价,来窥探大众对运算平台的成本期待。所以我们得出结论,如果整个位置跟踪系统做到了鼠标这么便宜,才有资格成为一个消费级的产品。”
为寻实现方案,把人类史上的位置跟踪方案看个遍
2014 年,在明确了这个位置跟踪系统对性能还有成本的要求之后,Depth-VR 开始寻找 VR 位置跟踪系统最适用的方案,他们按照声光电磁惯性的顺序,把整个人类历史上用过这些位置跟踪方案都看了一遍。
第一个研究的是超声波定位技术,因存在延迟和回声反射的问题,以及追踪目标数量太少、部署起来太麻烦等一系列缺憾,并不适合用作 VR 设备。
而电磁定位技术则需要理想的磁场环境,磁场容易被干扰,容易衰减或被去掉,因此用这种技术得到的坐标是一个不正确的坐标,所以也不作考虑。
最后一类是惯性动捕,这类叫 VMI 的产品,通过一套关节附近装了 IMU 传感器的衣服,测量人的每一根主要骨头的姿态,然后用钢体模拟出一个木偶,去分析这个人的整个身体和每个关节的动作,假想这个人在地面走,和地面之间是完全没有滑动摩擦的。

(图片来自嘉宾分享)
“我们看完声光电这三种方案之后,觉得不是特别靠谱,没有一个最优方法。最后没有办法,我们又回到了光学位置跟踪方法上。在现在和未来,这个行业的所有位置跟踪技术,基本上都会归纳到光学位置跟踪里。”
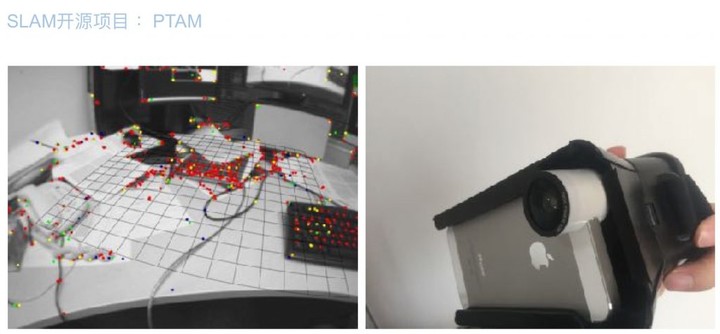
Depth-VR 开始考虑做一个叫 SLAM 的方案,利用了一套存在很久的算法和理论,通过摄像头的运动去分析环境,再进行算法反推自己的位置。Depth-VR 打算利用 iPhone 的处理器。
“有一个开源的算法我们直接移植到了 iPhone 上,在 iPhone 的摄像头上罩了一个广角的鱼眼镜头,摄像机通过鱼眼镜头拍到的图像视角比较广,就能看到将近 180 度的图像,让它的算法在 iPhone CPU 上跑。”
然而 iPhone 的 CPU 不给力,出现了跑完 SLAM 定位的 Demo 后无法正常游戏的情况。手机的运算能力有限,必须用专门的芯片,但开发成本过高,Depth-VR 无法承受。
(图片来自嘉宾分享)
Depth-VR 也有考虑过其它 VR 的巨头公司在使用的方案,比如 Optitrack ,一个由美国的光学动捕领域的龙头企业研发生产的产品。但 Depth-VR 在研究时发现,这些摄像机非常昂贵,VR 位置跟踪环境一套下来要几十万人民币。出于对成本的考虑,Depth-VR 抛弃了很多方案,其中包括深度相机。
“大家都知道鼠标才几十块钱,你要是专门只完成一个定位的任务的话,这个设备的成本也不应超过两百块钱吧,成本是非常敏感的。尤其是现在 VR 或 AR 的内容还没有起来的时候,设备必须走低价的路线,不然的话,你卖一个高价格缺少内容的一个设备,几乎不会有人买这种东西。”
参考各大厂家的定位方案,仍难寻最优方案
为了找到最优的实现方案,Depth-VR 不是没有尝试过向其它 VR 巨头学习的。
索尼 PlayStation 的 3 代和 4 代的方案,是基于计算机视觉和光学动捕。Depth-VR 研究了他们的方案后,发现其运算量太大,要依赖主机。
“这个方案我们当时也抛弃了。因为我们对空间位置跟踪设备的定义,是一个单独的传感器,不应依赖任何的外部运算资源,我们想做的是一个脱离外部运算资源的独立传感器。”
和索尼一样,Oculus 头盔的定位系统也依赖 PC 去做位置跟踪,于是Depth-VR 研究一番后又放弃了。

(图片来自嘉宾分享)
后来,他们看到唯一不依赖 PC 运算能力方案的 HTC VIVE,精确度能达到零点几度。但因为它采用激光还有其他的一些配件,外部整体的成本也比较高。它的成本不能满足 Depth-VR 的要求,同时还存在激光会互相干扰,导致同一个空间不能扩展多个外部定位系统的问题。到最后,他们连 HTC VIVE 的方案都抛弃掉。
自成一套光学位置跟踪系统
Depth-VR 花了一年的时间研究所有的方案,却绝望地发现没有一个原理是他们能够直接使用的,不得不发展一套自己的光学位置跟踪系统。
“新研发出来的系统比其它方案都要好,比如说它的跟踪范围及距离,还有延迟、精度,最重要是它的成本,都领先行业。我们还重新设计了摄像机的光学系统,这与其它定位方案不一样。”
Depth-VR 在光学结构上做了一些创新。以前的摄像机,是一个镜头对一个传感器,光线从镜头里进来打到传感器上成像,再拿到电脑里做图像分析。
“我们在镜头的后面加了一种很特殊的材料,它能够把这个可见光反射到侧面立起来,垂直站起来的这个图像传感器上,也就是侧面的这个图像传感器可以接收到可见光,把 850nm—905nm 的红外光直接透视到 45 度的反光镜,直接打到地下红外的传感器上。这样我们就能通过一个镜头获得两个不同波段的图像。”

(图片来自嘉宾分享)
这个被命名为同轴多光谱相机的创新,颠覆了以前的摄像效果。
为了让系统不依赖外部的运算设备,Depth-VR 做了很多工作。他们的设备是一个完全独立于外部计算资源的一个传感器,所有的运算在摄像机内部进行。
令人称奇的是,Depth-VR 用来做图片处理运算的 CPU 是一个非常低端的 ARM 芯片,整个 VR 定位跟踪系统成本能够控制在 100 元以内。

(图片来自嘉宾分享)
与此同时,Depth-VR 的 VR 定位跟踪系统还非常优秀,其他的参数比如精度能控制再 1mm 以内,做到差不多 0.1mm 的定位误差,严格控制抖动程度。延迟也非常低,小于 5ms。
从 2014 年中旬开始,Depth-VR 按着光学思路研发产品,直至 2016 年成型。目前这个定义为传感器的产品,能做到无限扩展,还能避免遮挡问题,能在大场景里面去大范围部署并扩展它在位置跟踪的范围。
注:文中数据不做投资参考;感谢爱扒词转录整理。






