





OpenAI 造出一款机械手臂,50 小时就能累积一百年的训练量
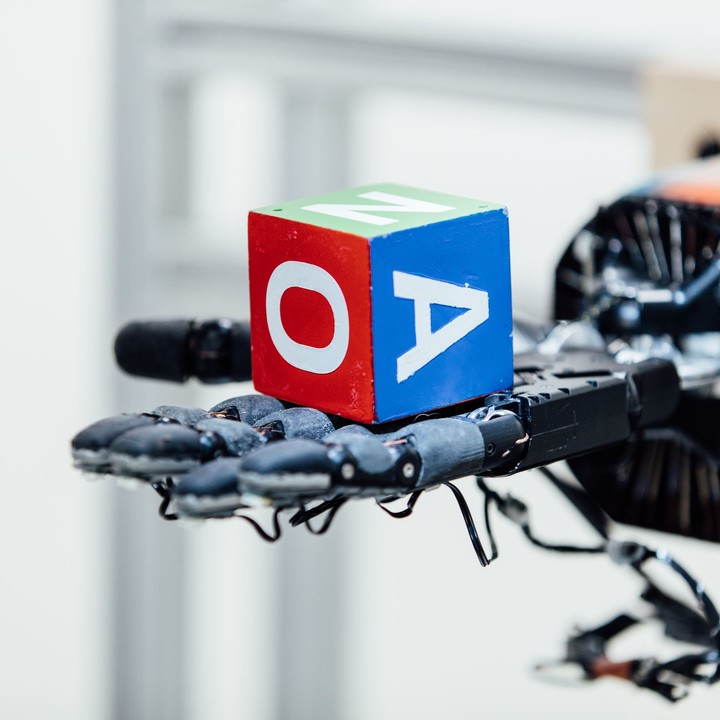
由伊隆·马斯克(Elon Musk)创办的非盈利性人工智能组织 OpenAI,今天向我们展示了一项新的研究成果:让机械手可以像人手一样抓取和操纵物体。虽然这种仿真造型的手掌我们已经见过很多了,但让“手指”能够和人类的真手一样灵活可动,对机械结构来说可不是一件简单的事。
但你在下面的动图中也能看到,这套名为 Dactyl 的机械手系统能够按照指令要求,轻松完成转动立方体的动作,而且这种包含各种技巧的指尖操作,显然要比过去我们所看到的机器人行走跳跃复杂得多。
Dactyl 自所以能够实现这么高效的运作,和 Open AI 使用的强化学习算法有关系。就像是刚出生的小孩一样,AI 或是机器人刚造出来后同样什么都不懂,如果你希望它能够完全理解某项复杂任务的流程,肯定需要进行反复的训练。
尤其是对于真实存在的物理机器人来说,研究人员往往要耗费大量的现实时间对其进行指导练习。

但 OpenAI 现在的做法,则是完全在虚拟环境中对 AI 机器人进行训练,然后再把 AI 应用在实体机器人身上。他们还会在训练的过程中增加大量的动态随机事件,让 AI 在这个过程中自己领悟出完成任务的诀窍。
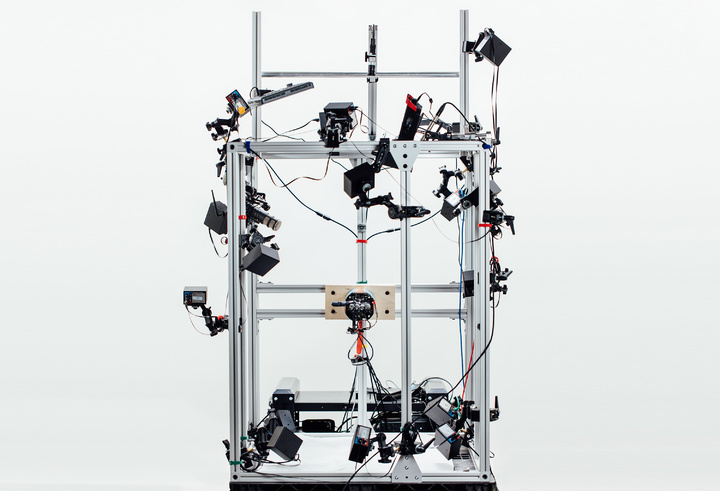
以这次的机械手掌为例,他们会在一个控制网络中教导机械手臂最基础的翻转指令,以及利用摄像头,在视觉网络中预估立方体的位置和方向;然后便开始改变周围环境的灯光和噪声,还有立方体的颜色、重量、纹理和摩擦力等;甚至是改变训练过程中的重力环境因素。
之所以会加入这些随机化的变量,也是为了让 AI 能更好的应对各种意外情况的发生:“比如说不同的重力环境下,Dactyl 自己就会去领悟这会对立方体操控造成哪些影响。不然在现实世界中,一旦我们改变手臂的高度,重力环境发生改变,立方体可能就会从手中滑落。”
另外,由于不用模仿人类的行为,所以 OpenAI 的训练方式也可以允许 AI 充分去思考人类没有思考过的方式,说不定还能获得意想不到的成果。
这种虚拟环境的训练模式还有一个好处,那就是不会耗费现实世界的时间。目前 Dactyl 已经积累了大约 100 年的训练经验,尝试用无数种方法来控制立方体的转动,但实际上这个过程只相当于我们现实世界中的 50 个小时而已。
在虚拟世界里完成训练后,AI 就可以应用这些经验去分析现实世界里的动态因素,并调整自己的行为来完成任务了。如今 Dactyl 已经可以连续完成 50 次的立方体旋转操作,且不会出错。
值得一提的是,这种超高效的训练模式不仅能运用在物理机器人上,也同样可以用于其它的虚拟 AI 模型。在去年 7 月份,OpenAI 开发的 Open AI Five 也同样在虚拟世界里经历了上万个小时的学习,实际上只是花费了几天的时间,然后它便在 Dota2 游戏中击败了职业选手 Dendi。
虽然只是一次 solo 对决而非 5v5,但依旧让我们看到了人工智能在电竞这种复杂领域的有效性,包括我们所熟知的“围棋杀手” AlphaGo,也是 DeepMind 公司使用深度强化学习训练出来的 AI 模型。
据说强化学习的灵感最早来源于人类对自然界动物学习过程的长期观察,之所以近几年内才开始尝试,也是受益于神经网络技术的进步,以及 OpenAI 本身的规模优势。一旦强化学习的基准更为多样和复杂,自然也得付出不小的运算成本。
按照 OpenAI 给出的数据,Dactyl 的训练设备动用了约 6144 颗 CPU,以及 8 颗来自 Nvidia 的 V100 GPU,这种规模的基础硬件只有很少数的研究机构才能够使用。
总得来说,OpenAI 提出的“将模拟环境的成果应用到现实世界”会是开发通用机器人的有效解决方案之一,但也有机器人专家认为,这种程度的实验结果只会局限在某一个特定任务上,能否真正解决现实世界的难题,则仍然是一个未知数。
题图来源:OpenAI





