






蔚来今天的史诗级更新,不过是李斌 3 年前挖的「坑」
NIO Day 2023 依旧是充满温度的 NIO Day,同时也是最硬核的一届 NIO Day,蔚来发布了全球首个兼顾智能化和高集成度的集成式液压主动悬架,也就是「SkyRide 天行全主动悬架」。
台上的李斌花了不少时间来介绍这套系统,从软件到硬件,从技术到功能,细致入微。但最后,征服现场所有观众的,还是那辆端着水杯过减速带的 ET9。

直观,震撼。
只可惜在 2025 年之前,我们还不能在路上看到集各种「黑科技」于一身的蔚来 ET9,自然也无法得知天行悬架的表现是否如李斌所言,但蔚来最近倒是推出了一个主动悬架「青春版」——4D 舒适领航。
上周,蔚来发布了 Banyan·榕 2.4.0 版本智能车载系统,带来了超过 50 项功能的新增及优化,涵盖驾控体验、座舱娱乐、主动安全等领域,如今的 NOMI 甚至能识别「把小李往前挪一挪」这样的指令。
不过,最受用户关注的新功能,当属只有在 7、8 两个旗舰系列中才能体验到的 4D 舒适领航。

一份蔚来车主独享的「地图」
70、80 年代电子技术的喷涌,让刹车和传统系统实现了电子控制,但直到 21 世纪,感知技术和计算机控制的大规模应用,才真正让汽车进入了电子化、信息化的时代。
原本功能单一的主动悬挂系统也逐渐向更精细、更高效的方向发展,迭代成为了如今我们时常能够听到的 CDC(Continuous Damping Control)。这套系统引入了更先进的传感器和控制算法,能够提供根据路面反馈提供更连续和精确的悬挂调整,更好地平衡车辆和操控性和舒适性。

不过,这也意味着 CDC 系统的反应是基于当前和过去的驾驶条件,而不是预测未来的道路状况。
相比之下,奔驰的「魔毯悬架」(Magic Body Control)采取了一种更先进的方法。它使用摄像头预先扫描道路表面,识别前方的凸起和坑洞,并在车辆到达这些地方前,对悬架进行调整。
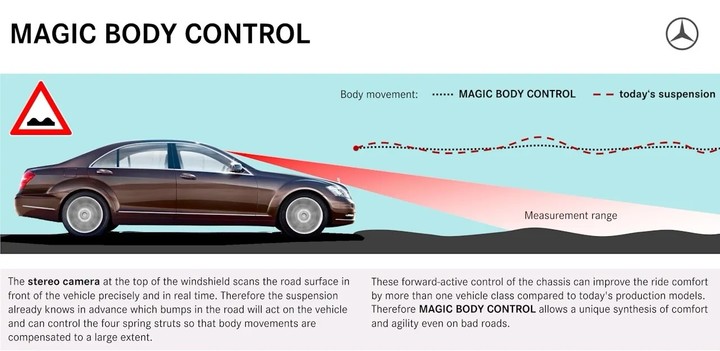
能预知未来、提前应对,自然是更好的。
不过,魔毯悬架也有着它的局限性。在复杂或低光照条件下,摄像头的表现并不尽如人意,即便是换成性能更好的激光雷达,同样也可能因为前车的阻挡,而无法扫描道路。
蔚来的做法就很好地规避了感知问题,它的秘诀在于一张地图。
说得具体一些,蔚来深度自研的智能悬架控制域,不仅能够实时感应从底盘回传的悬架信息、车轮信息和车身信息,还能利车身传感器,不断记录路面上的颠簸情况,形成一张带有路面信息的 4D 路况图层。

4D 路况图层就像是一份地图,共有 6 种路面事件,包括上下坡、减速带、大小起伏,以及连续颠簸。车辆每 4 次路过同一路段,就会生成一个路面事件,记录下这一路段的类型和特征,后续要驶过这一路段前,悬架便会提前准备调节高度、主动调整阻尼控制策略。
蔚来整车应用软件负责人肖柏宏表示,在同一路段里,只要有配备空气弹簧和 CDC 减震的蔚来车型经过 4 次,就可以对该路段的颠簸图层精选确认,无论是不是同一辆蔚来汽车。

如此一来,蔚来这份「地图」的鲜度可以达到「天」级水平,而且随着路上支持该功能的蔚来车辆越来越多,这份「地图」也会愈发完善。
换句话说,路上所有带空悬和 CDC 的蔚来汽车都在共同绘制这张地图,并一起享受着它带来的好处。
有点像之前的特斯拉。
去年 3 月,特斯拉在北美为所有 Model X 和 Model S 用户提供了类似,但较为初级的功能——依靠标注数据的主动空气悬挂,车辆能够在开上崎岖路面前做好准备,提高悬挂系统的舒适性。而这些数据,全部来自路上的特斯拉,包括没有空悬的 Model 3 和 Model Y。
人人为我,我为人人
蔚来和特斯拉的做法,可以说是一种群体智能。
群体智能,指的是一群个体通过相互协作和信息共享,形成的一种集体性的智能,典型例子包括社群媒体、维基百科、开源软件等。而在汽车这一行,最前沿的例子便是特斯拉的 FSD。
2022 年,特斯拉在 10 月 1 日举办了首届 AI Day。当我知道这一消息时,我无比快乐,这意味着我能够在国庆节当天投身工作,与祖国共奋进。

那一天,特斯拉人形机器人 Optimus 晃晃悠悠地走上舞台,给了世人一个小小的赛博震撼。当时,特斯拉表示,那台人形机器人使用了与特斯拉汽车完全相同的计算平台,它的所有动作,都是通过 AI 模型的学习得来的。
放到车上也一样。
彼时,FSD Beta 的用户已经超过了 16 万人,在如此大规模的「测试团队」的帮助下,特斯拉在当时就已经拥有了超过 14.4 亿帧视频数据。同时,马斯克摒弃了去年近千人的标注团队,对数据标注流程进行了全面优化,训练速度提高了 30%。

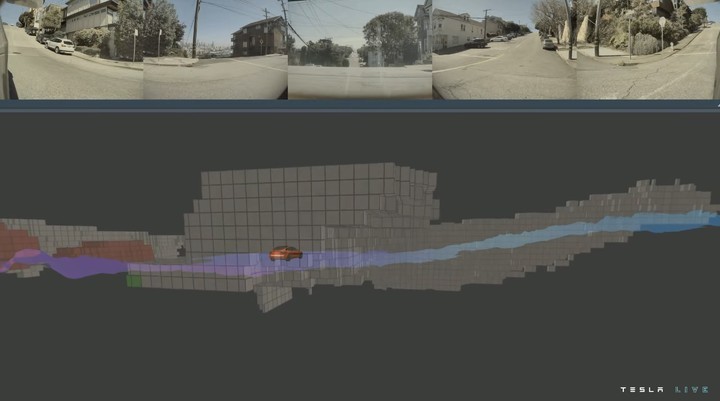
同一天,特斯拉还搬来了一个如今我们已经无比熟悉的名词,Occupancy 占用网络。在这套模型里,我们的世界看起来就和 Minecraft 一样,由一个个网格组成。面对被「占用」的网格,即便车辆不能认出障碍物,也会做出避让动作。
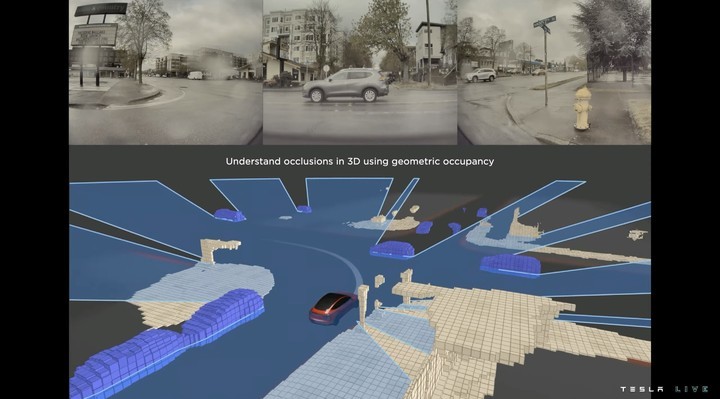
同时,车辆还能识别出道路的坡度,根据实际的道路情况,提前做出加速或减速的动作。特斯拉当时表示,开始转向 AI 的 FSD 可以在小于 10 毫秒的时间内,列出超过 7500 万种影响决策的因素,迅速做出最安全的决策。
得益于 AI 的加入,以及大量的数据投喂,FSD 成长得飞快。
同样是在上周,特斯拉开始正式向用户推送 FSD V12(v12.1.2),其在更新说明中写道:
FSD Beta V12 将城市街道驾驶堆栈升级成了端到端神经网络,特斯拉车队提供的数百万次视频训练,取代了 30 多万行 C++ 代码。
海外博主 Whole Mars(@WholeMarsBlog)在其评测视频中表示,FSD V12 的驾驶行为非常自然,它会在顺滑地避开车道中停止的车辆,会在必要时果断变道,面对行人也不会像受到惊吓一样小心翼翼,一切都行云流水。
该博主称,FSD Beta V12 「是 FSD 最大的一次进步,在所有关键方面都实现了重大改进」。
如今,国内的自主品牌们也在朝着这个方向努力,FSD 所采用的「BEV+Transform」方案几乎成为了标配。
在 2022 年的小鹏汽车 1024 科技日上,小鹏发布了基于 BEV 和 Transform 的 XNet 1.0;次年,小鹏又发布了 XBrain,组成了动态 BEV+静态 BEV+占用网络的 XNet 2.0。华为的 ADS 2.0 同样基于 BEV +Transformer 架构,加入了 GOD 通用障碍物检测网络,其对标的就是占用网络。

但在数据规模上,特斯拉可谓是「遥遥领先」。
如今,特斯拉已经卖出 400 多万辆汽车;截至 2023 年 Q1,FSD V11 就已经有了 40 万的订阅用户;截至 2023 年 Q3,FSD 的行驶里程达到了 5.25 亿英里;特斯拉的影子模式,还能在车主没有激活 FSD 的情况下,获取驾驶经验。
智能汽车已然从一辆车,扩大、生长,成为了一个群体。蔚来显然很早就参悟了这个道理,为了推出 4D 舒适领航功能,他们已经铺垫了很久。

早在 2021 年,蔚来 ET7 发布时,一项名为 4D 智能车身控制系统的东西也一同浮出水面,那便是如今 4D 舒适领航功能的原型。
但这玩意儿光靠一辆车可不行,蔚来今天能把当初挖的坑填上,离不开在座各位蔚来车主的努力。





